Arduino 控制金属齿大扭矩舵机
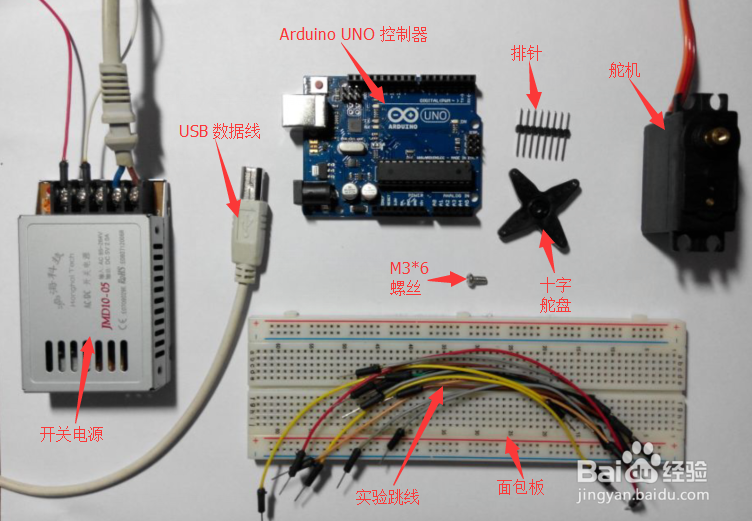
1、准备实验需要用到的硬件,如图所示:
2、如下图所示进行硬件的连接,此步我们先不连接任何其他元件,只需将Arduino UNO控制器连接到电脑

3、如下图所示,我们先不使用电位计控制,只是使用程序来控制一个舵机,将下列程序复制到Arduino IDE中或者可以直接在最后一步中提供的百度网盘地址中直接下载代码和 Fritzing 电路图
#include <Servo.h>
Servo myservo;
int pos = 0;
void setup()
{
myservo.attach(9);
}
void loop()
{
for(pos = 0; pos <= 180; pos += 1)
{
myservo.write(pos);
delay(15);
}
for(pos = 180; pos>=0; pos-=1)
{
myservo.write(pos);
delay(15);
}
}

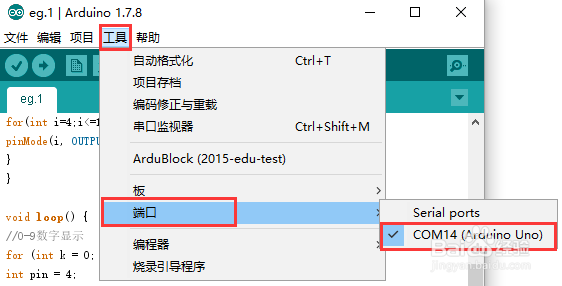
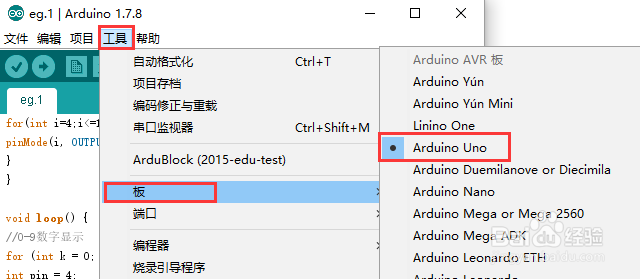
4、如图所示,选择正确的板卡型号和端口,将程序上传到控制器中。
5、如图所示,程序上传无误的情况下 Arduino IDE 软件会显示如下结果,在上传过程中,Arduino 控制器板载的 TX RX 灯会频闪

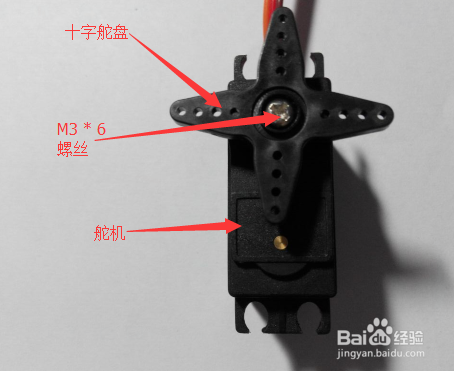
6、如下图所示,使用舵盘连接螺丝,连接舵盘和舵机
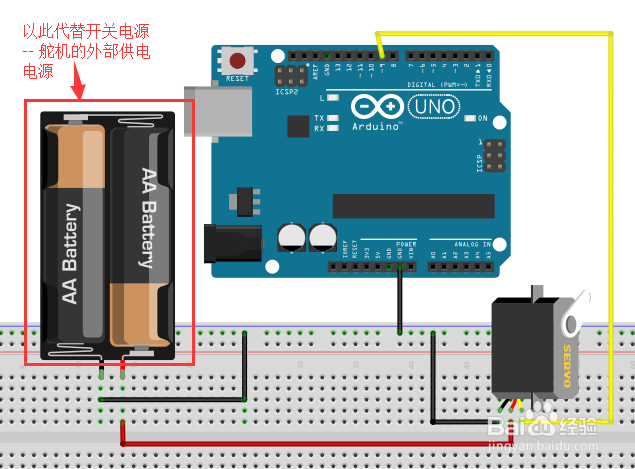
7、按照下图中的电路,进行实验硬件的连接
棕、红、橙(棕色连接 GND、红色连接 Vcc、橙色连接信号 S)
需要注意的是,外部供电电源的 GND 与 Arduino UNO 控制器的 GND需要连接在一起,否则舵机不会转动
8、实验效果如图所示,舵机会自动从 -90 度转动到 90 度,再从 90 度转动到 -90 度。注意当 Arduino UNO 控制器连接到电脑供电时,舵机会自动归回中间位置

9、为了方便大家实验,防止在复制代码的时候出现错误,特将代码和电路图
Fritzing源文件上传至网盘供大家下载学习。下载地址:
http://pan.baidu.com/s/1bPK082,打开链接后,如图所示,点击下载即可
