虚拟机器人转弯
1、一、 建立机器人模型(方法和直行一样)
在此省略
2、编写机器人转弯
1. 启动:双击“模型与编程”图标,再选择平台的“流程图编程”来编程。
2. 新建一个程序,并将它保存至你刚建好的D盘的“转弯”文件夹,
3. 编写转弯程序:
3、机器人转弯,只需要用到3个动作,即“移动”、“等待”和“方向盘”,


4、转弯的角度为-100到100,转弯的是前轮所以端口号设置为1和2
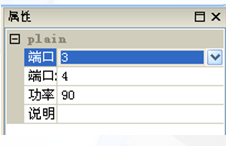


5、方法总结:①添加动作“移动”,设置端口号和功率 ②添加动作“等待”,设置时间 ③编译 ④保存
6、机器人转弯仿真运行
1. 启动:双击“仿真”图标,再选择平台的“打开”来加载地图,选择地图
2. 点击“机器人”,选择D:\转弯\zhuanwan. bot,加载机器人
3. 点击“程序”,选择D:\转弯\zhuanwan. rtb ,加载程序
4. 点击开始就可以仿真运行了

声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:149
阅读量:180
阅读量:76
阅读量:156
阅读量:134