如何分析电动轮椅车的控制系统参数?
1、解本题主要研究根据系统稳定性及动态品质要求,选择系统参数的方法。
(1)使系统稳定的K值范围。由系统结构图可得, 系统开环传递函数:
G(s)=K1K2K3/(O. 5s+1)(5+1)(0.25s+1)
=8K/( s3+7s3+ 14s+8)

2、闭环传递函数,如下图所示。

3、闭环特征方程:
D(s)=s3+7s2+ 14s+8(1+K)= 0

4、列出劳斯表如下图所示。

5、由劳斯判据知,使闭环系统稳定的K范围为:-1< K< 11. 25
6、(2)确定使ts =4s时的K值及特征根。ts计算公式参见下图。

7、故相应条件下希望特征方程,如下图所示。

8、而实际闭环系统特征方程为:
D(s)=s3+7s3+ 14s+8(1+K)=0
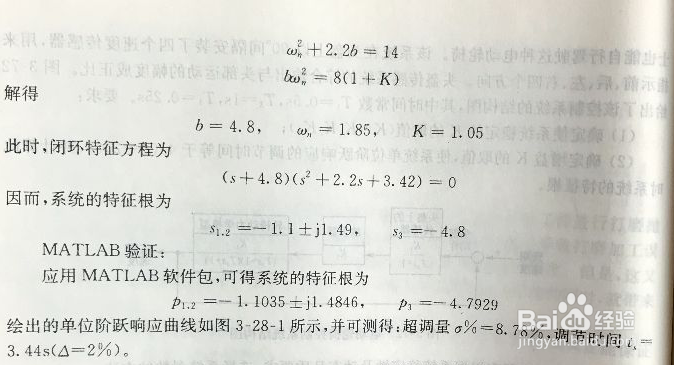
比较希望特征方程与实际特征方程可得
2.2+b= 7
结果如下图所示。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:95
阅读量:36
阅读量:139
阅读量:187
阅读量:180