姿态角(Euler角):yaw pitch roll
1、(1)
姿态角,首先知道什么是地面坐标系和机体坐标系?
地面坐标系(earth-surface inertial reference frame)
①在地面上选一点Og
②使xg轴在水平面内并指向某一方向
③zg轴垂直于地面并指向地心
④yg轴在水平面内垂直于xg轴,其指向按右手定则确定
如图所示:

2、(2)
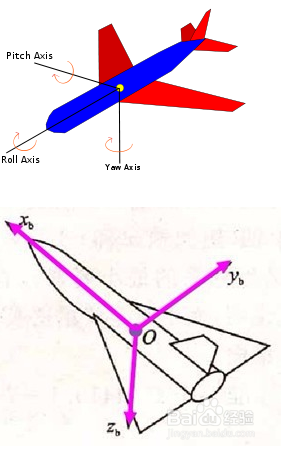
机体坐标系(Aircraft-body coordinate frame)
①原点O取在飞机质心处,坐标系与飞机固连
②x轴在飞机对称平面内并平行于飞机的设计轴线指向机头
③y轴垂直于飞机对称平面指向机身右方
④z轴在飞机对称平面内,与x轴垂直并指向机身下方
如图所示:
3、(3)
欧拉角/姿态角(Euler Angle)
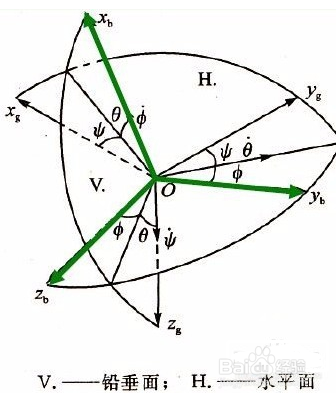
机体坐标系与地面坐标系的关系是三个Euler角:yaw,pitch,roll,
反应了飞机相对地面的姿态。
4、(4)
俯仰角θ(pitch):
机体坐标系X轴与水平面的夹角。
当X轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负。
pitch是围绕X轴旋转,也叫做俯仰角,
如图所示:
5、(5)
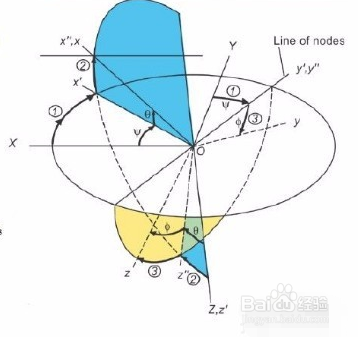
偏航角ψ(yaw):
机体坐标系xb轴在水平面上投影与地面坐标系xg轴(在水平面上,指向目标为正)之间的夹角,
由xg轴逆时针转至机体xb的投影线时,偏航角为正,即机头右偏航为正,
反之为负。
yaw是围绕Y轴旋转,也叫偏航角,
如图所示。

6、(6)
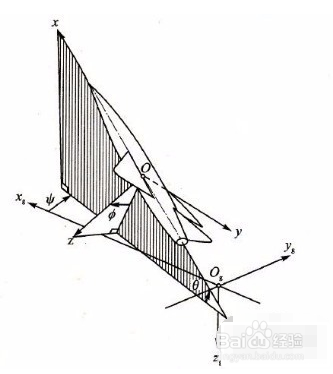
翻滚角Φ(roll):
机体坐标系zb轴与通过机体xb轴的铅垂面间的夹角,机体向右滚为正,
反之为负。
roll是围绕Z轴旋转,也叫翻滚角,
如图所示:

7、(7)
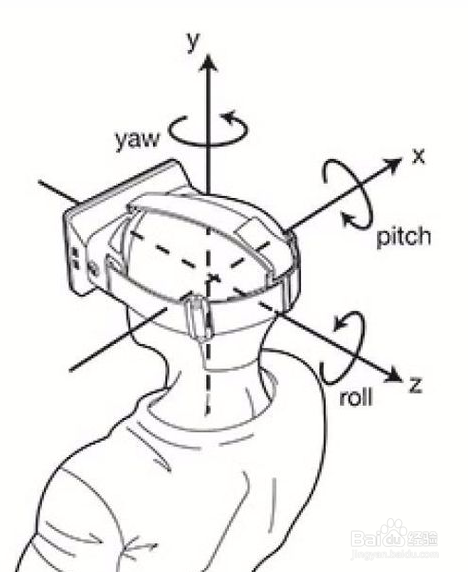
模型引用:
头模型的姿态角,标注
如图所示:
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:68
阅读量:125
阅读量:116
阅读量:72
阅读量:76