如何分心车轮和车轴模块?
1、库:Simscape / Foundation Library / Mechanical / Mechanisms。
如下图所示。

2、描述:
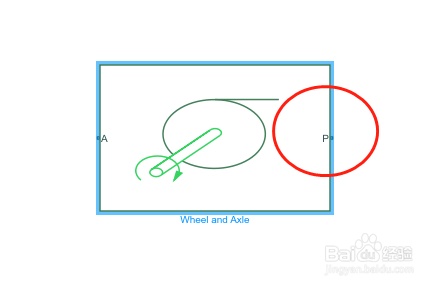
轮轴块表示下图所示的轮轴机构。

3、车轮和车轴具有相同的轴,且轴被假定为刚性连接到框架上,从而使该机构成为机械转动转化为机械平动运动的理想转换器。该机构有两个连接:一个机械旋转端口a,对应于车轴;一个机械平移端口P,对应于车轮周边。该机制用以下方程式描述:
4、T是轴上的扭矩。
F是车轮边缘的力。
ω是角速度。
v是车轮边缘的线速度。
r是车轮半径。
或是机构方位指示器。如果在全局指定的正方向上的轴旋转转换为正向的平移运动,则该值为+1。如果正旋转导致负方向的平移运动,则值为–1。
在模拟齿条小齿轮、方向盘、起重装置、起锚机等方面使用块。
块正方向是从A到参考点,从参考点到P。
5、变量:
要在仿真之前设置块变量的优先级和初始目标值,请使用“块”对话框中的“变量”选项卡(或“块特性检查器”中的“变量”部分)。有关详细信息,请参见设置块变量的优先级和初始目标。
6、A — Axle
与车轴相关的机械旋转保存端口。

7、P — Wheel periphery
与车轮边缘相关的机械平动保护端口。
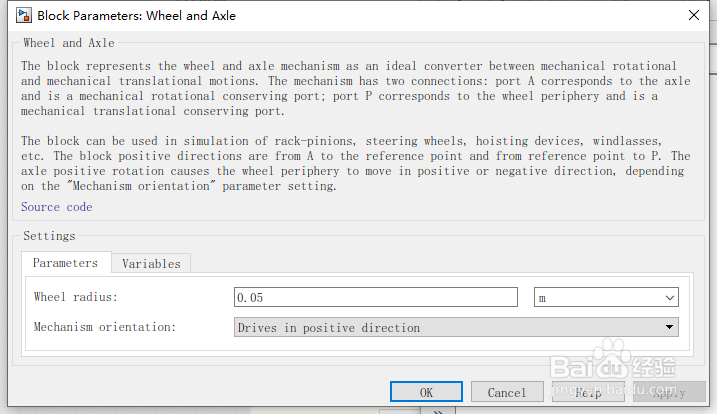
8、Wheel radius — Radius of the wheel
0.05 m (default)
车轮半径。
Mechanism orientation — Relationship between axle rotation and direction of translational motion
值Drives in positive direction指定一种机制,在该机制中,轴在全局指定的正方向上的旋转转化为正向的平移运动。值Drives in negative direction指定一种机制,在该机制中,轴在全局指定的正方向上的旋转转化为负方向上的平移运动。
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。