smart200plc PID调节
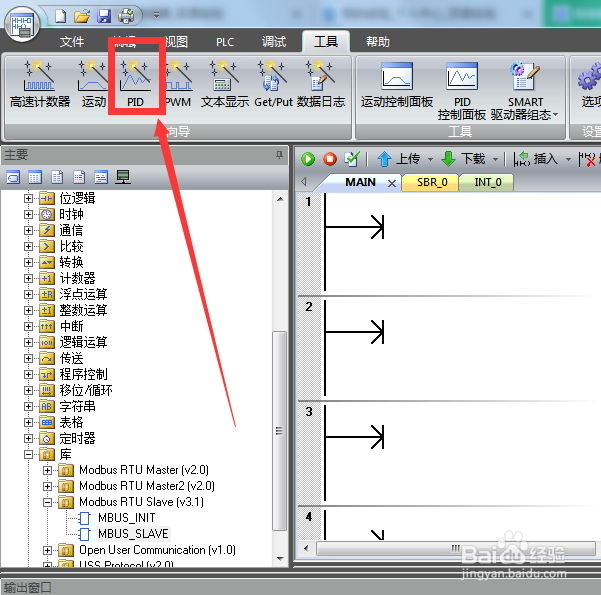
1、打开smart 200plc编程软件,找到菜单栏中的【工具】点击打开

2、选择【工具】子菜单中的PID 选项,点击进入。
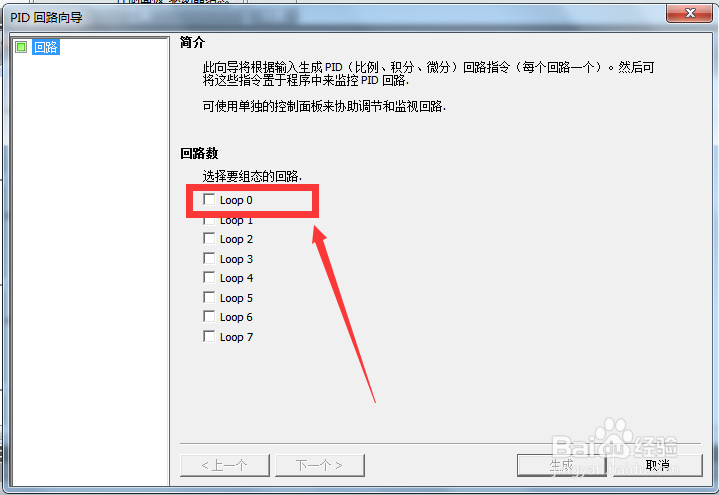
3、在弹出的回路向导窗口中选择【Loop0】
4、在输入菜单中类型选择【双极性】,变量可根据需求更改。

5、在输出菜单中类型选择【模拟量】极性,变量可根据需求更改。

6、在报警菜单中将权限报警勾选上。

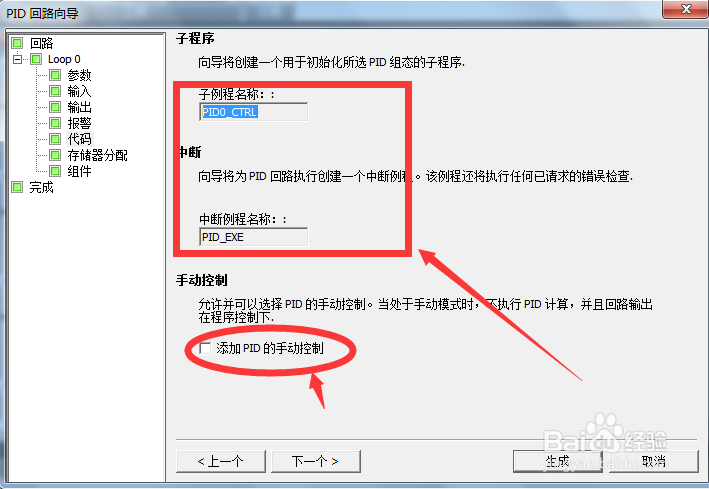
7、在代码菜单中给PID定义名称,也可选择手动控制。
8、在存储菜单中,选择【存储器分配】区域,或点击【建议】分配区域。

声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:24
阅读量:157
阅读量:32
阅读量:173
阅读量:191