机器人直行——“易时代3D仿真虚拟机器人”
1、一、 建立机器人模型
1) 启动:打开桌面或开始菜单的机器人“模型与编程”图标即,再选择模型与编程平台的“打开”即来打开地图,选择
“ C:\易时代3D仿真虚拟机器人初中教材版\Example\智能校车\教学案例通用校车地图.tsk”
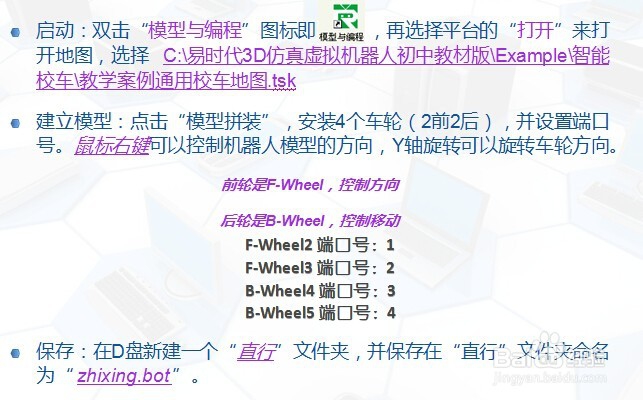
2、2) 建立模型:点击平台左上角的“模型拼装”即
a) 安装直行需要的马达,即四个车轮。
b) 通过鼠标右键可以控制机器人模型的方向,方便安装车轮;车轮的方向可以通过转换,一般情况下都是
前轮是F-Wheel,控制方向
后轮是B-Wheel,控制移动
3、 c) 放置好车轮的同时,需要对四个车轮设置端口号:
F-Wheel2 端口号:1
F-Wheel3端口号:2
B-Wheel4端口号:3
B-Wheel5端口号:4
d) 都设置完成之后,就可以保存了。先在D盘新建一个“直行”文件夹,并将机器人模型文件保存在“直行”文件夹命名为“ zhixing.bot ”。
e) 保存完成可以不关闭机器人平台。
方法总结:①打开地图 ②建立机器人模型的四个车轮 ③设置车轮端口号 ④保存
4、二、编写机器人直行程序
想要使机器人行动,还需要对它进行编程。
1) (上一步已关闭的同学需要重新启动程序,即打开机器人“模型与编程”图标,再选择平台上的“打开”来打开地图)选择流程图编程即
2) 新建一个程序,并将它保存至你刚建好的D盘的“直行”文件夹,即
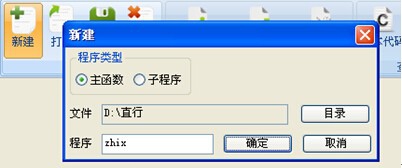
5、点击确定之后就即可编程了。
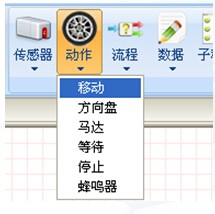
3) 编写直行程序:新建之后平台就会自动添加一个,我们只需要将后续的动作等拖至此处链接即可。
机器人直行,只需要用到2个动作,即“移动”和“等待”,
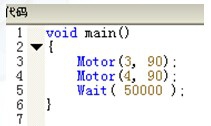
a) 在“动作”按钮下选择“移动”,并设置后轮的功率和端口号即设置“移动”的属性,功率决定机器人模型行走的速度,将“移动”与开始相连接
b) 在“动作”按钮下选择“等待”,并设置等待时间5000(以毫秒为单位),时间决定机器人模型行走的距离长短,再与“移动”相连接
c) 完成编程后选择编译并保存。
方法总结:①添加动作“移动”,设置端口号和功率 ②添加动作“等待”,设置时间 ③编译 ④保存


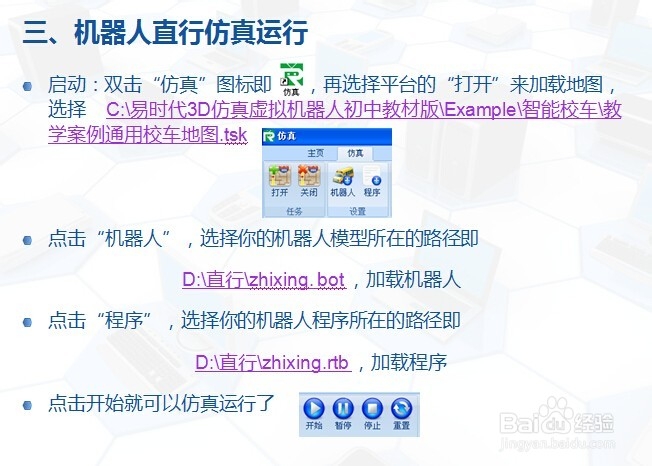
6、三、机器人直行仿真运行
a) 启动:打开桌面或开始菜单的机器人“仿真”图标即 ,再选择模型与编程平台的“打开”即来打开地图,选择 “ C:\易时代3D仿真虚拟机器人初中教材版\Example\智能校车\教学案例通用校车地图.tsk ”
b) 打开“机器人”,选择你的机器人模型所在的文件夹
c) 打开“程序”,选择你的机器人程序所在的文件夹
d) 点击开始就可以仿真运行了