#智能#诺宝RC如何让机器人走漩涡迷宫
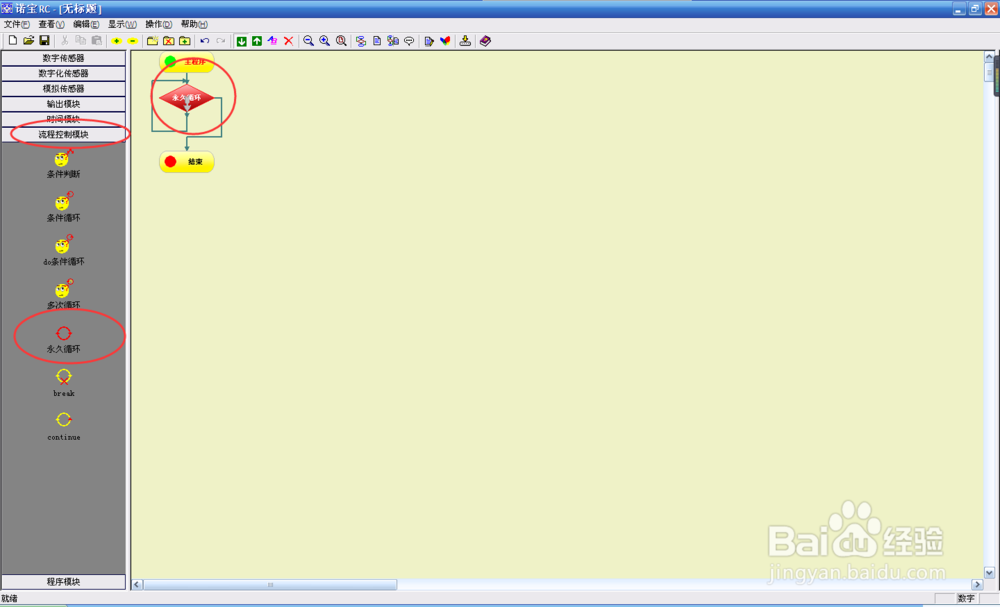
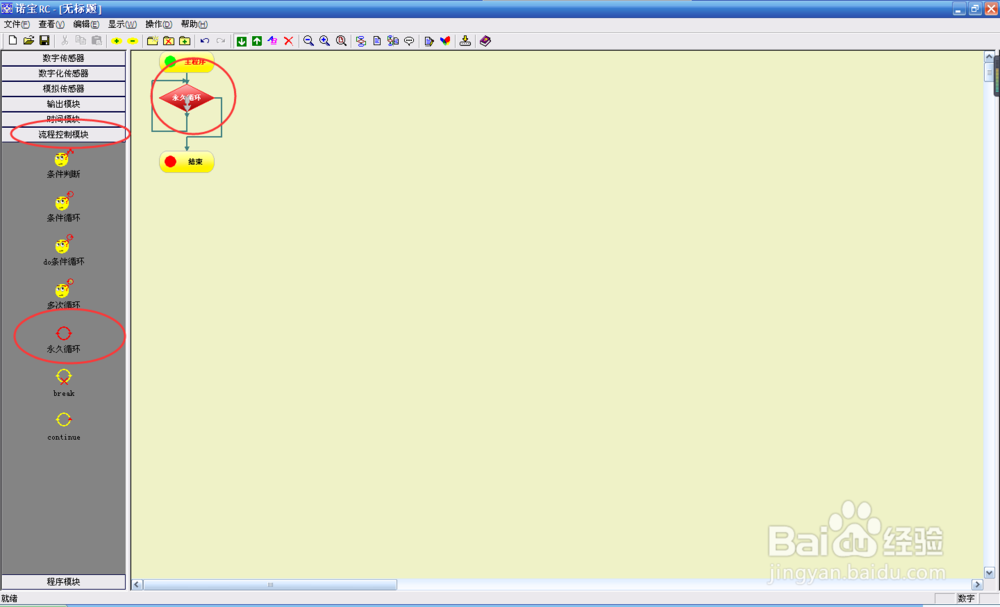
1、首先点击“流程控制模块”中的“永久循环”。
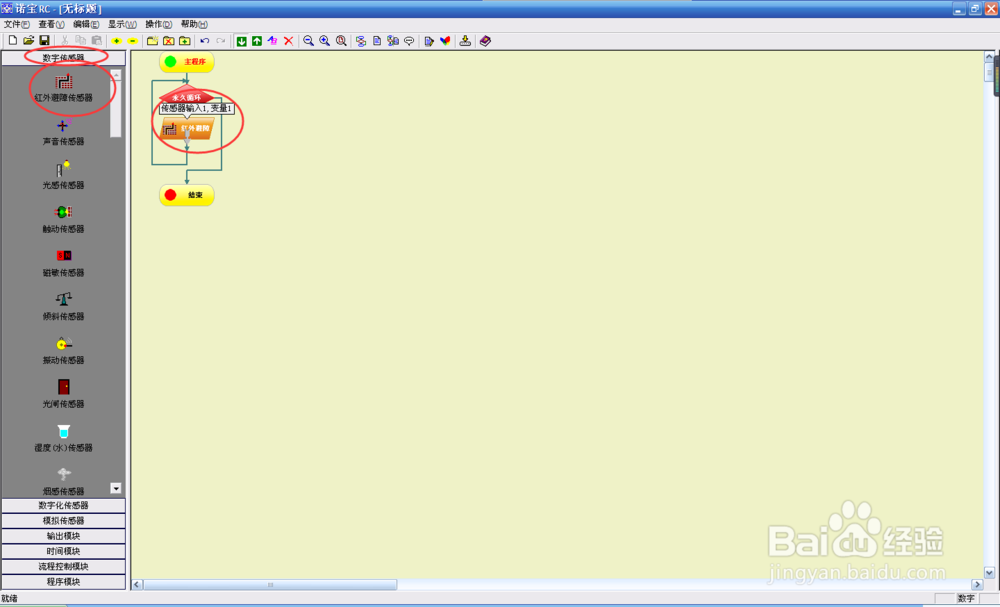
2、然后点击“数字传感器”中的“红外线蔽障传感器”,使机器人能够避障。
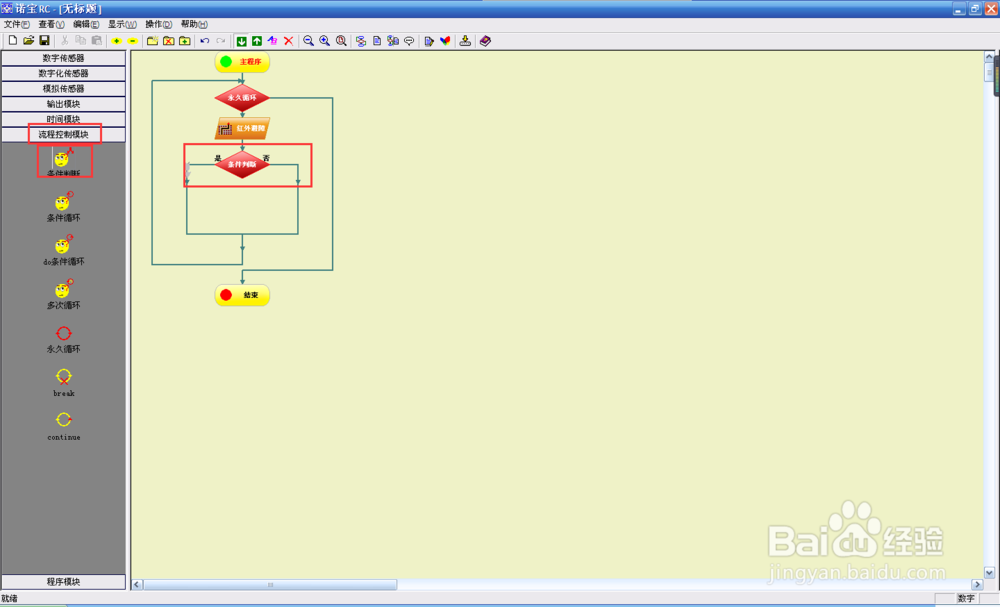
3、再点击“流程控制模块”中的“条件判断”,对实际情况进行判断。
4、在“条件判断”下方的“是”下面添加“输出模块”中的“转向”。
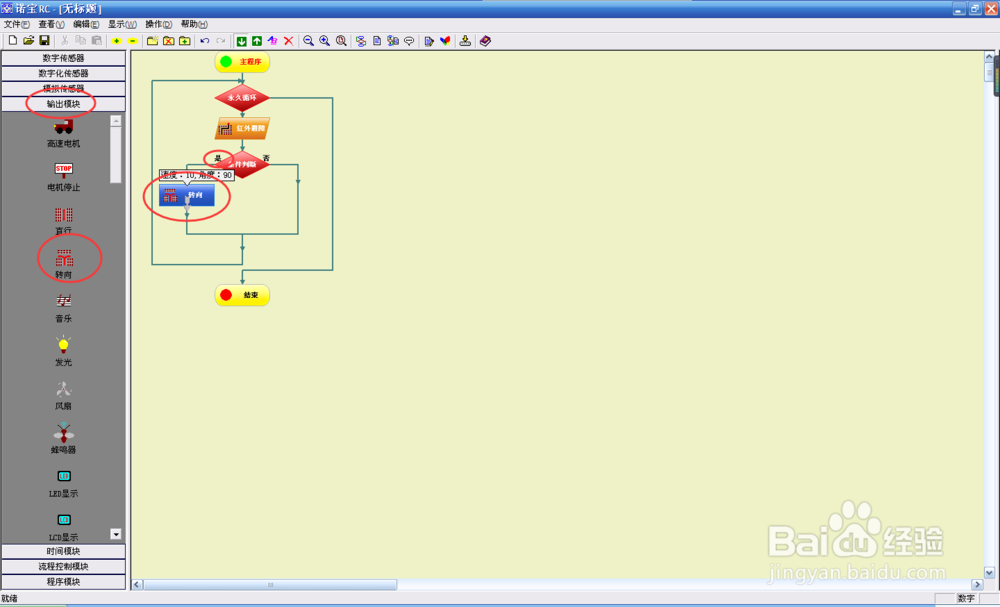
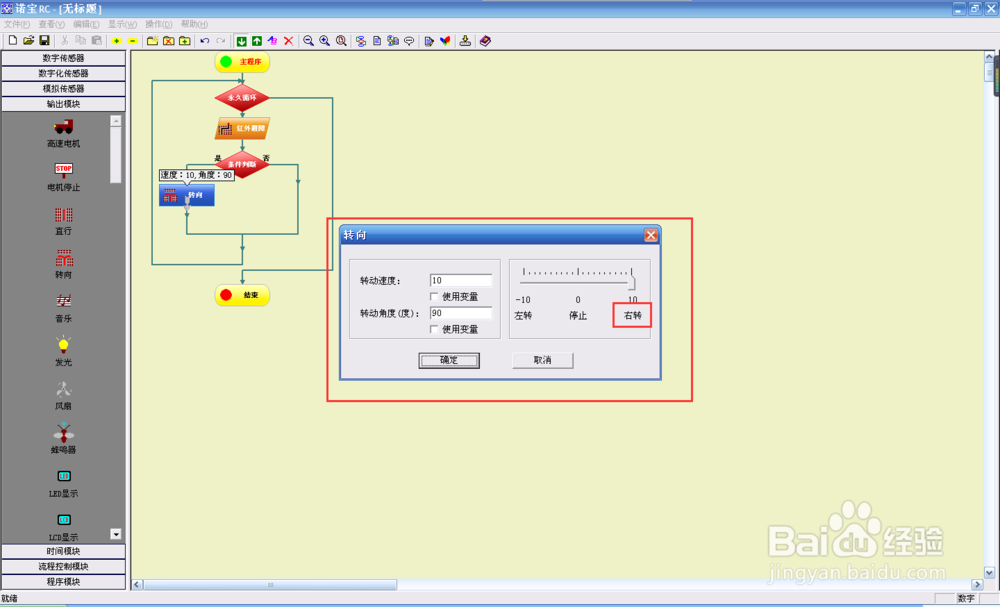
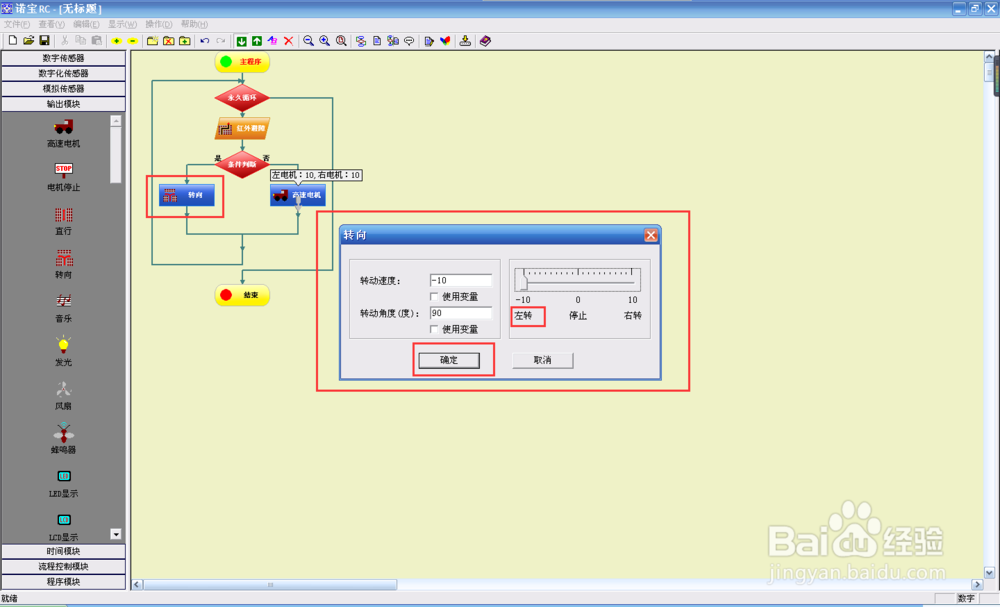
5、左键双击“转向”程序,出现设置框,旋转角度要是90°,速度自定,但是要是右转方向。
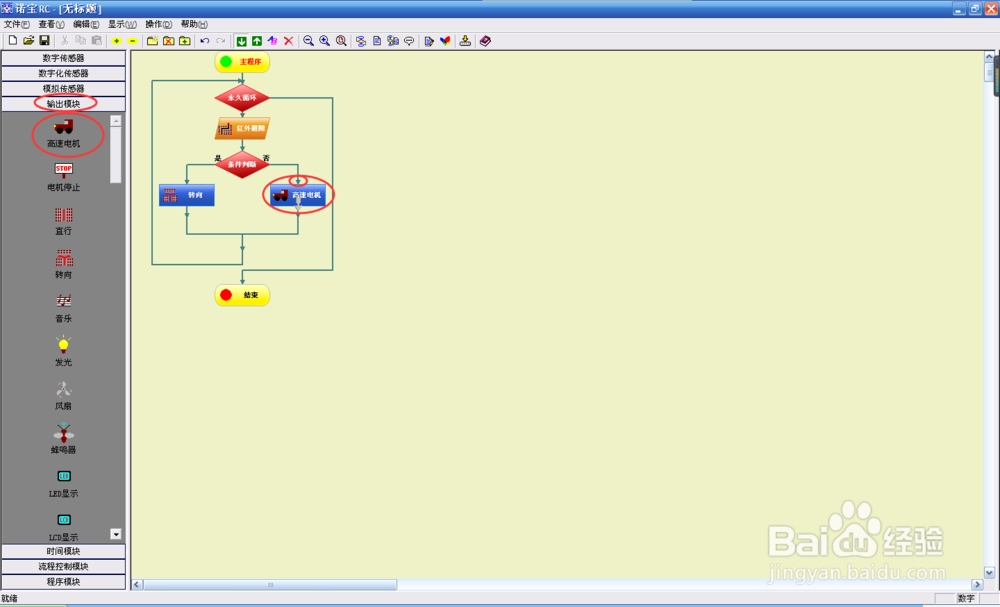
6、右键点击“条件判断”下方的“否”下面的小箭头,让灰色箭头移过来,再点击添加“输出模块”中的“高速电机”。
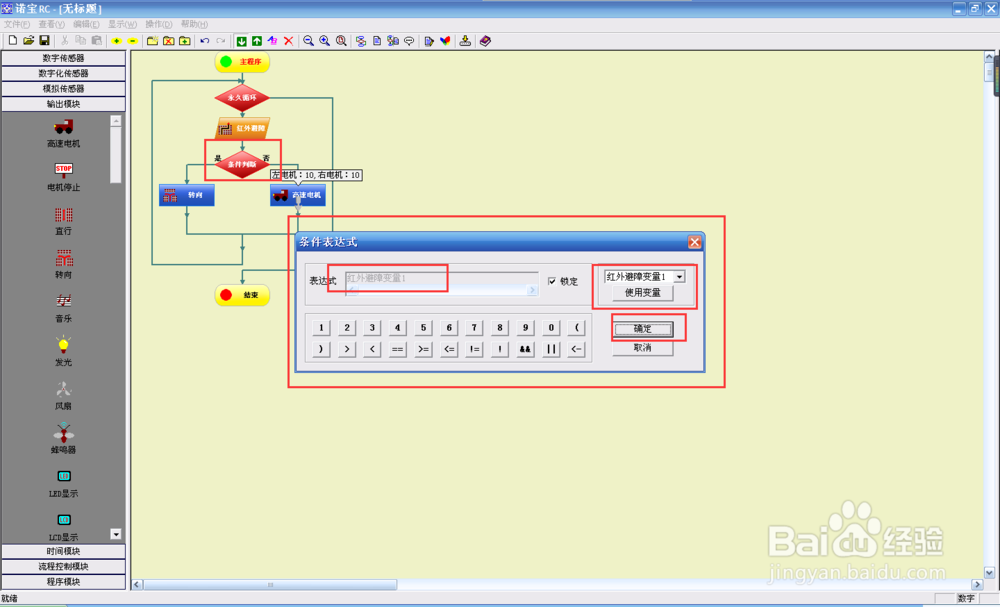
7、再左键双击条件判断,出现设置框,在右侧选择“红外线避障变量1”并点击“使用变量”,然后再点确定。现在就大功告成啦!
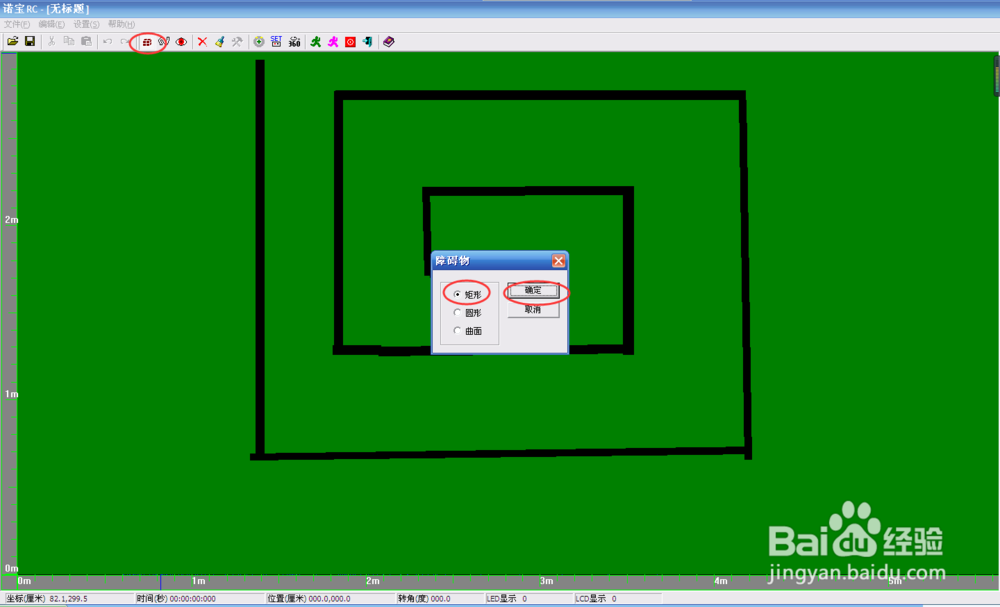
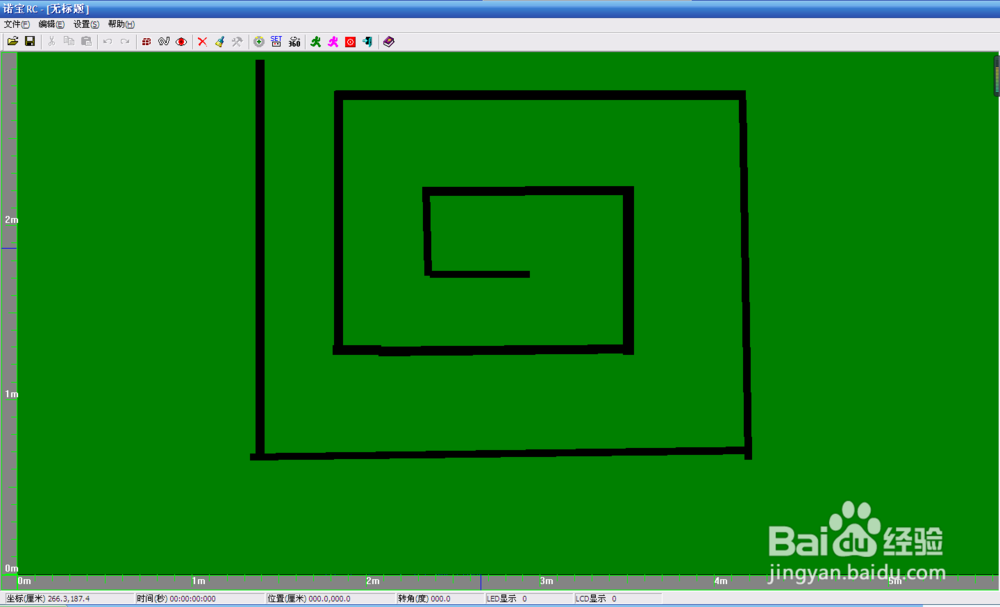
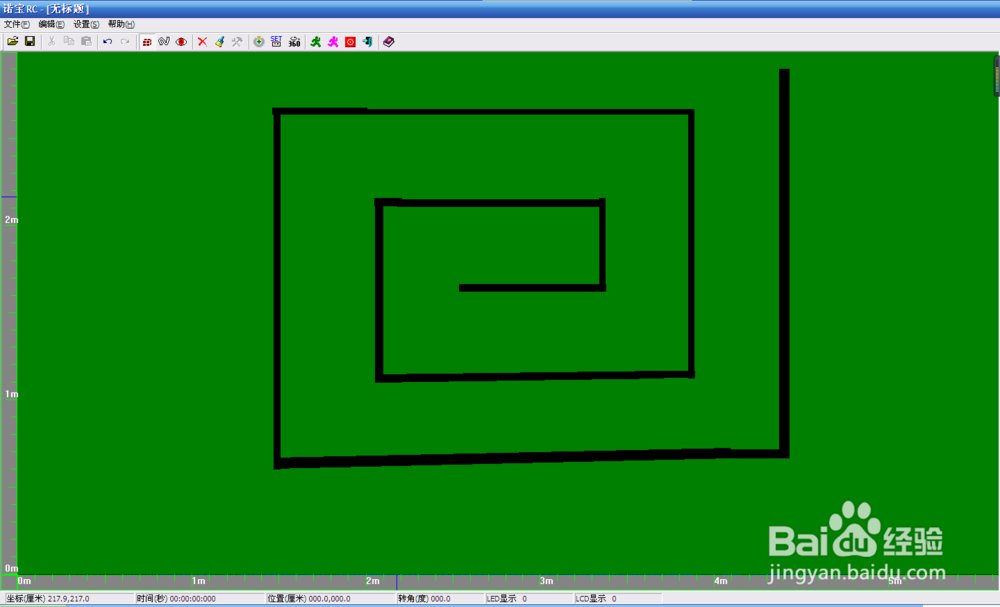
8、点击软件上方蝴蝶状的“仿真”按钮,进入仿真平台,点击“添加障碍物”,用矩形画一个漩涡迷宫。
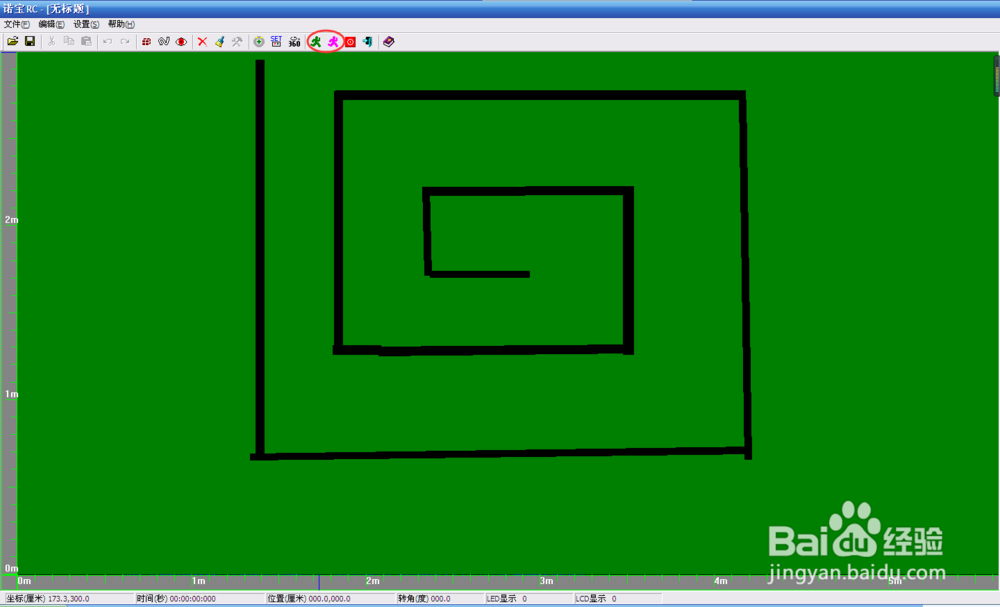
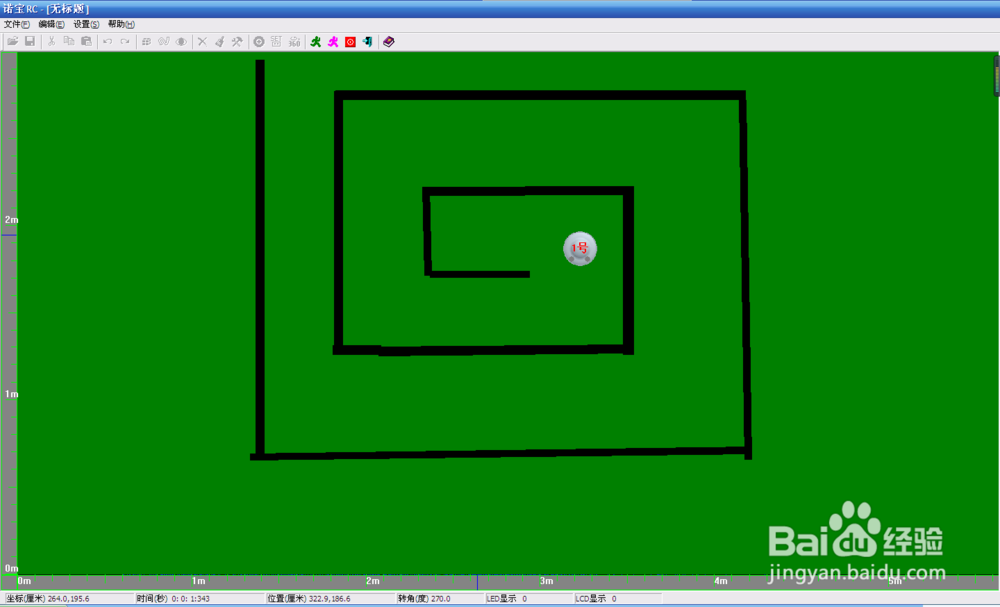
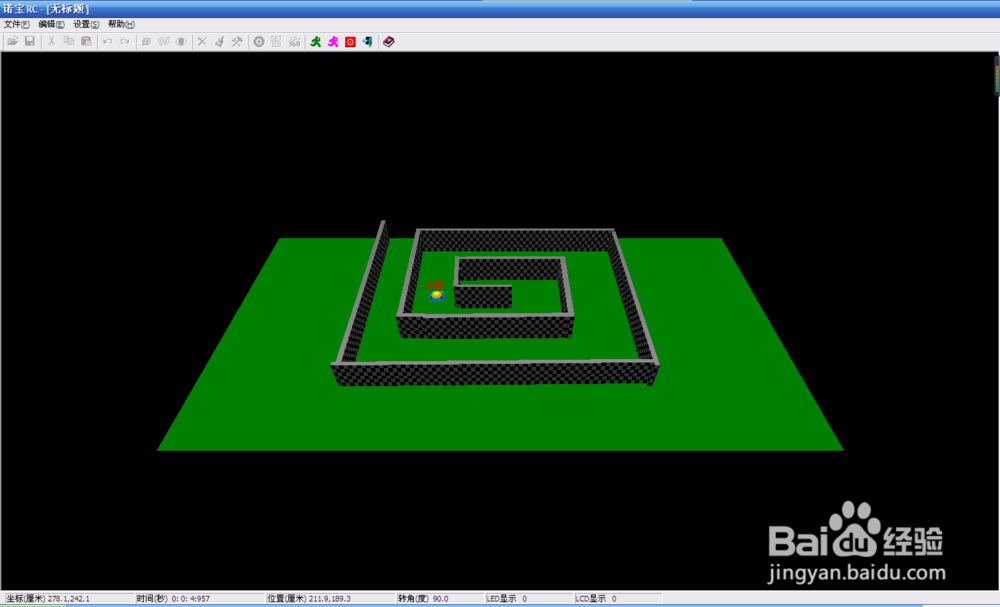
9、再点击上方小人奔跑状的按钮“仿真”或“3d仿真”,并将机器人放在漩涡中西,就可以看机器人走迷宫啦!
1、如果是与上教程反过来的漩涡,则在程序栏目中的“转向”设置框里选择左转即可。
2、如果要放到实体机器人上,组装好机器人并安装好程序就可以啦~
3、如果此经验对你有用,记得要投票并分享哦!

声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:194
阅读量:26
阅读量:27
阅读量:110
阅读量:67