腿部绑定:脚部反转脚设置
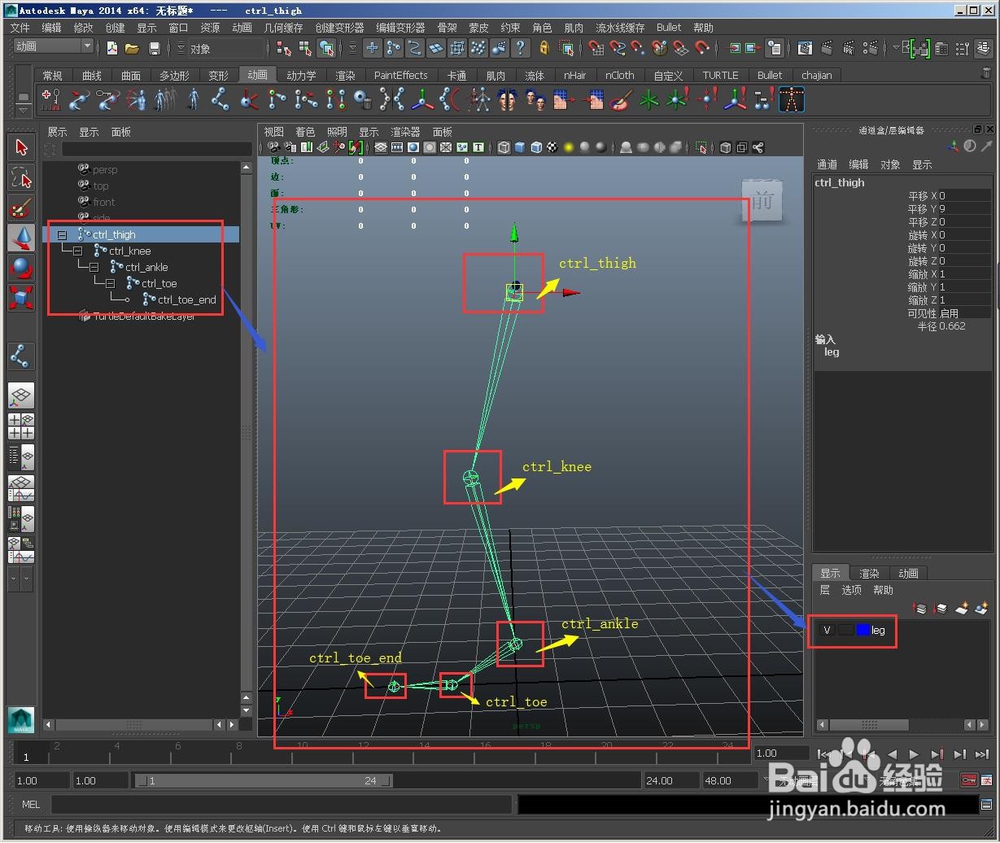
1、1:创建一节腿部骨骼,命名;
(1)给骨骼新建图层,设置为蓝色;
如图所示:
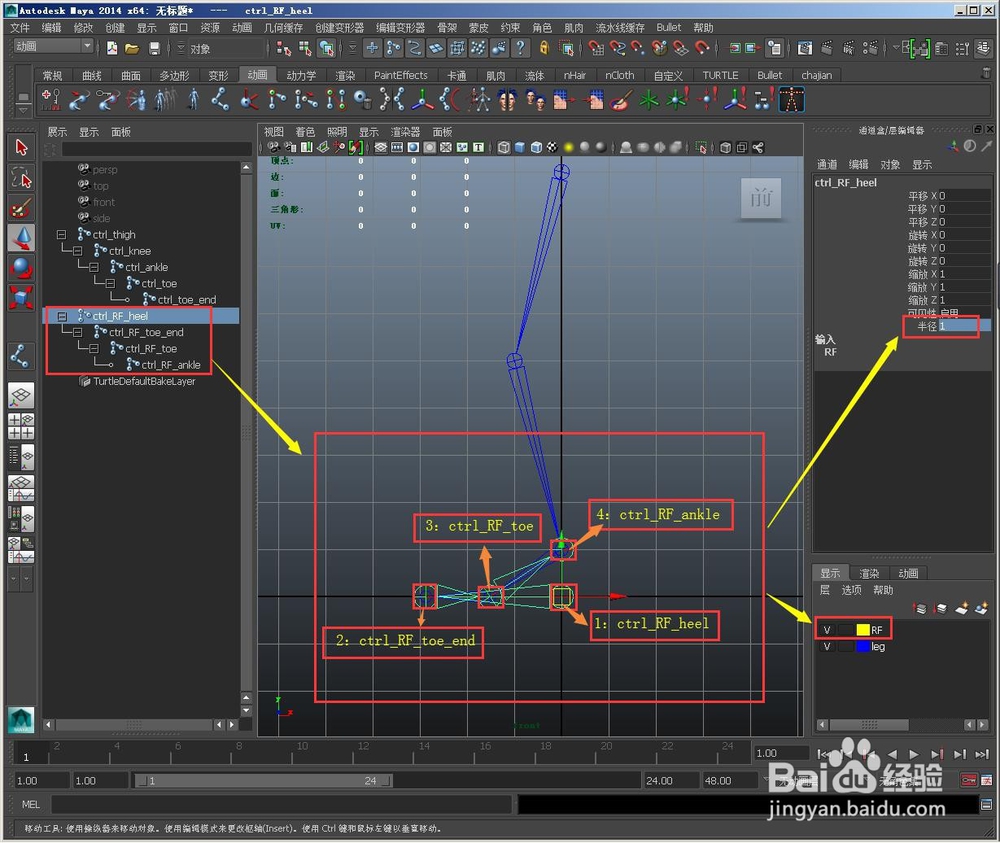
2、2:创建一节反转脚骨骼,命名;半径设置为1;
(1)给骨骼新建图层,设置为黄色;
如图所示:
3、3:关闭黄色图层,隐藏反转脚;
如图所示:

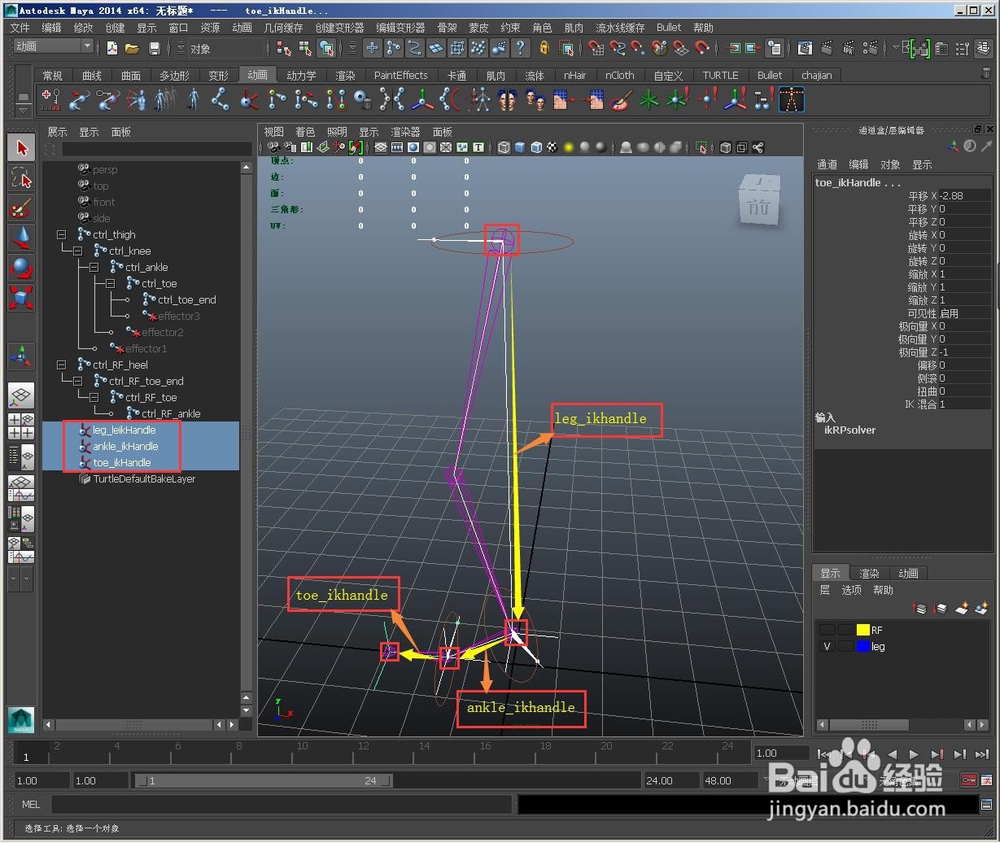
4、4:使用“IK控制柄工具”创建3个IK(旋转平面解算器):
(1)点击骨骼ctrl_thigh和骨骼ctrl_ankle,创建IK:leg_ikhandle;
(2)点击骨骼ctrl_ankle和骨骼ctrl_toe,创建IK:ankle_ikhandle;
(3)点击骨骼ctrl_toe和骨骼ctrl_toe_end,创建IK:toe_ikhandle;
如图所示:
5、5:打开黄色图层,显示反转脚;
如图所示:

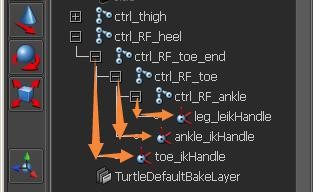
6、6:按“P”键,将IK赋给相对应反转脚骨骼当子物体:
(1)IK:leg_ikhandle给骨骼ctrl_RF_ankle当子物体;
(2)IK:ankle_ikhandle给骨骼ctrl_RF_toe当子物体;
(3)IK:toe_ikhandle给骨骼ctrl_RF_toe_end当子物体;
如图所示:
7、7:给脚部创建一个控制器,命名为foot,打组命名为foot_grp;
(1)将反转脚按“p”键给控制器foot当子物体;
如图所示:

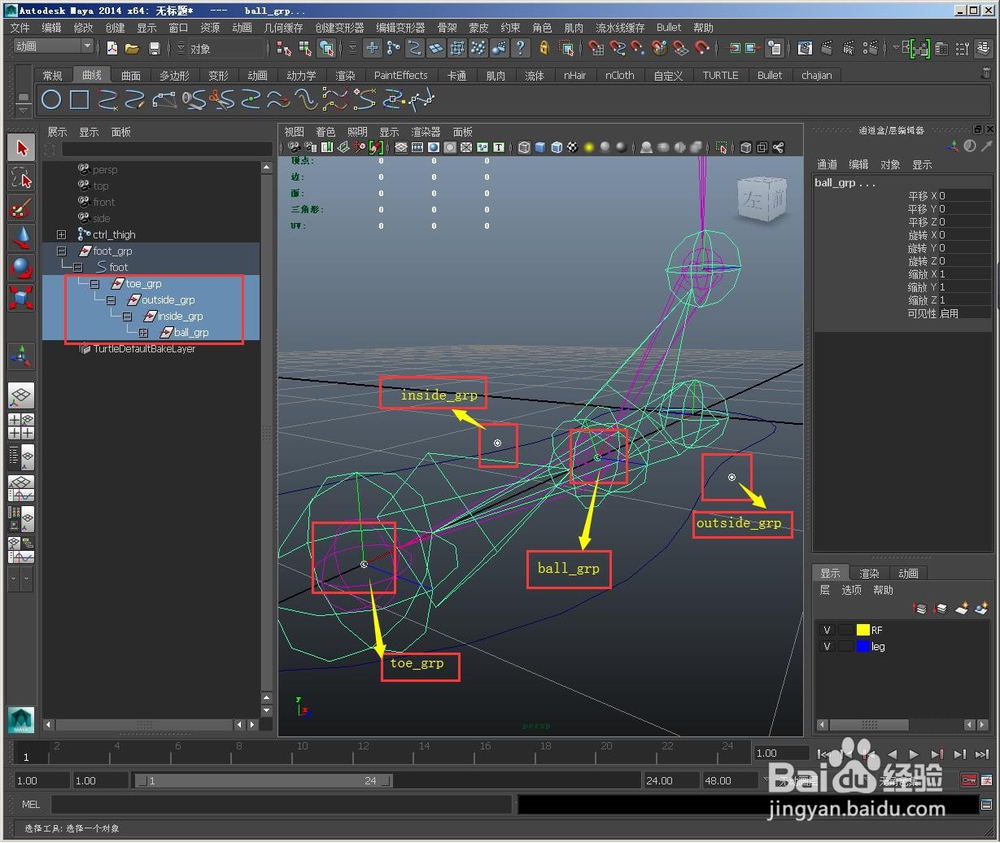
8、8:打组(在“显示——变换显示”,点击“旋转枢轴”,可以明确看到物体的中心点):
(1)选中反转脚骨骼ctrl_RF_heel,打组命名为ball_grp;按“D+V”键将轴心点吸附在反转脚骨骼ctrl_RF_toe上;
(2)选中组ball_grp,打组命名为toe_grp;按“D+V”键将轴心点吸附在反转脚骨骼ctrl_RF_toe_end上;
(3)选中组ball_grp,打组命名为inside_grp;按“D+V”键将轴心点吸附在反转脚骨骼ctrl_RF_toe的内侧;
(4)选中组inside_grp,打组命名为outside_grp;按“D+V”键将轴心点吸附在反转脚骨骼ctrl_RF_toe外侧;
如图所示:
9、9:给控制器foot“添加属性”,都是“浮点型”:(1)ballY;(2)ballZ;(3)toeY;(4)toeZ;(5)side;
如图所示:


10、10:打开“连接编辑器”(在“窗口——动画编辑器”)连接属性:
(1)控制器foot的ballY连接组ball_grp的rotateY;
(2)控制器foot的ballZ连接骨骼ctrl_RF_toe的rotateZ;
(3)控制器foot的toeY连接组toe_grp的rotateY;
(4)控制器foot的toeZ连接骨骼ctrl_RF_toe_end的rotateZ;
11、11:打开“表达式编辑器”,编写脚本;
编写:
float $side = foot.side;
inside_grp.rotateZ = min(0,$side);
outside_grp.rotateZ = max(0,$side);
点击“创建”;
如图所示:
