如何进行粒子滤波预测与校正?
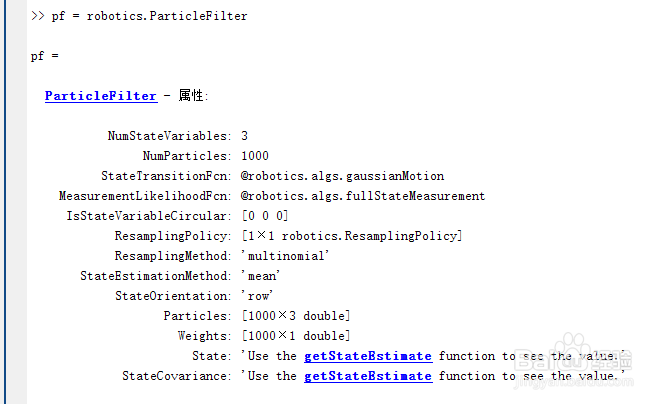
1、%使用默认的三种状态创建粒子过滤器。
命令行键入:
pf = robotics.ParticleFilter
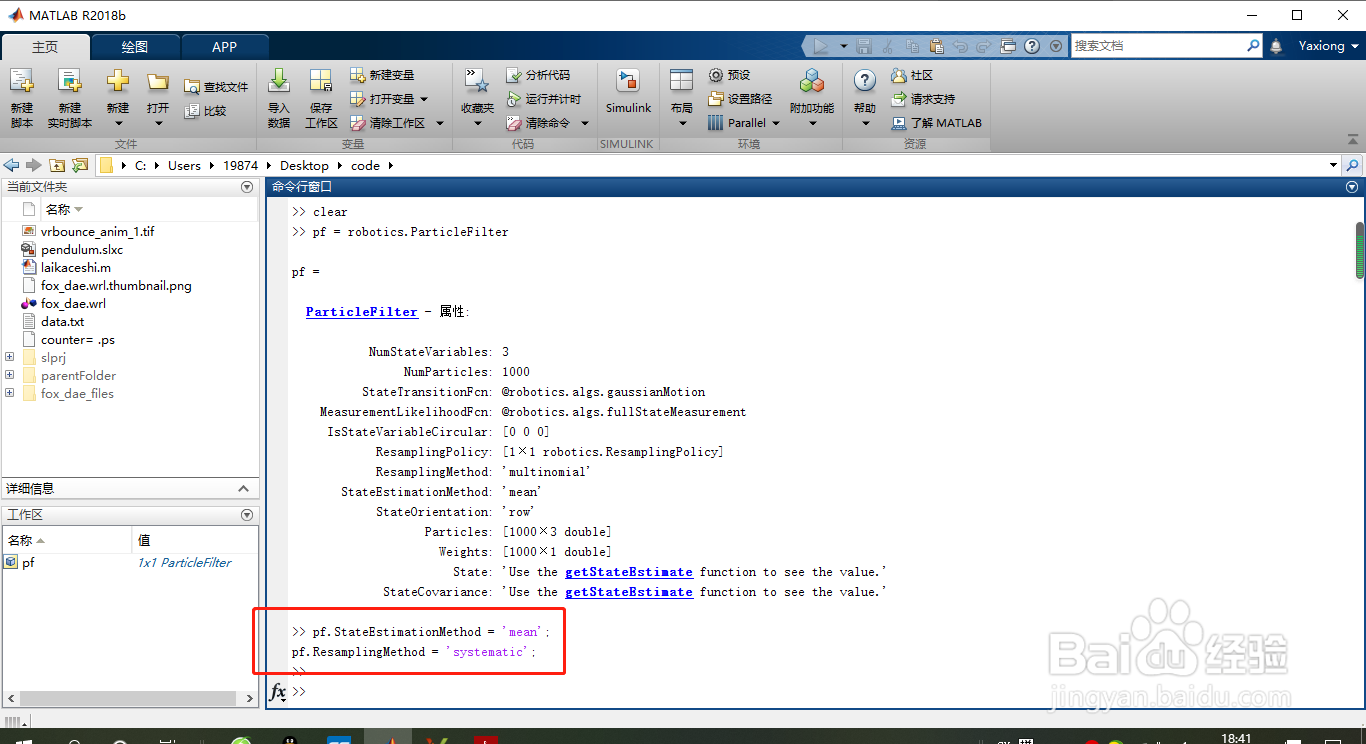
2、%指定平均状态估计方法和系统重采样方法。
命令行键入:
pf.StateEstimationMethod = 'mean';
pf.ResamplingMethod = 'systematic';
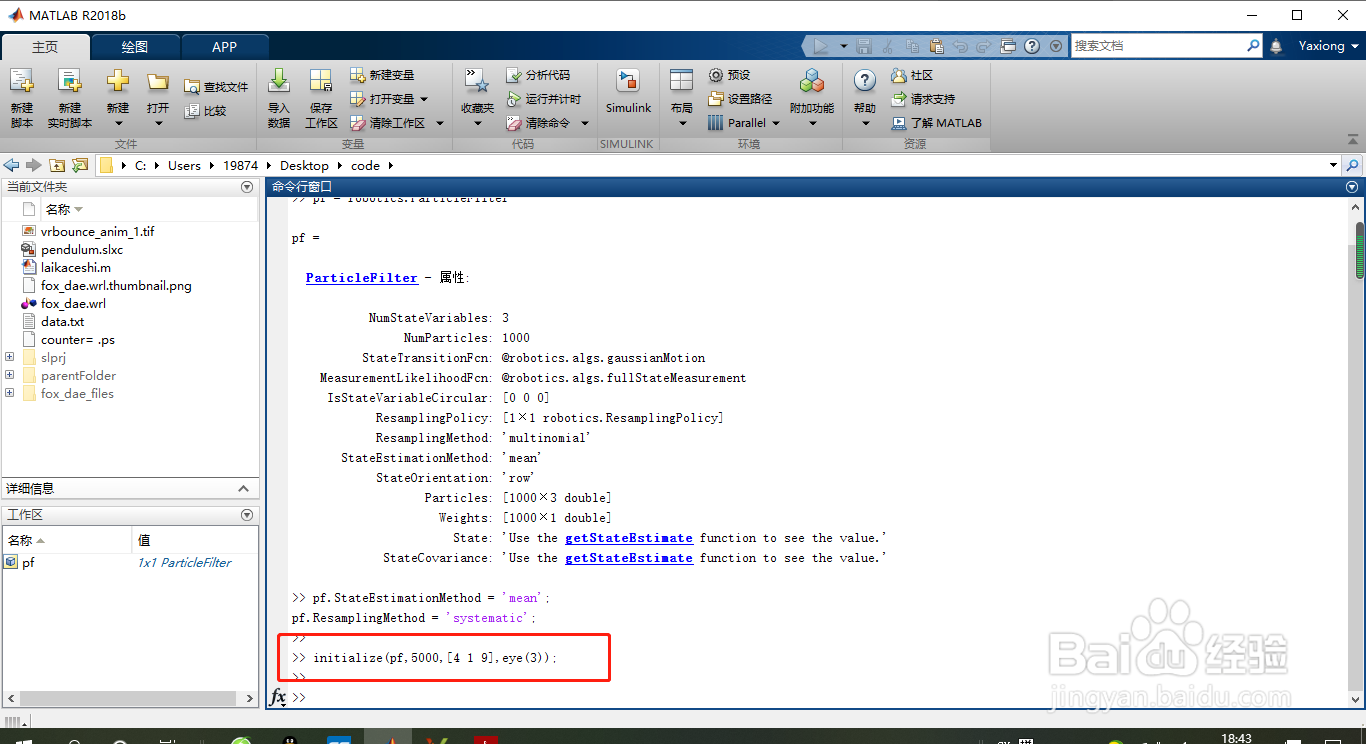
3、%使用单位协方差(eye(3))在状态[4 1 9]下初始化粒子滤波器。使用5000个粒子。
命令行键入:
initialize(pf,5000,[4 1 9],eye(3));
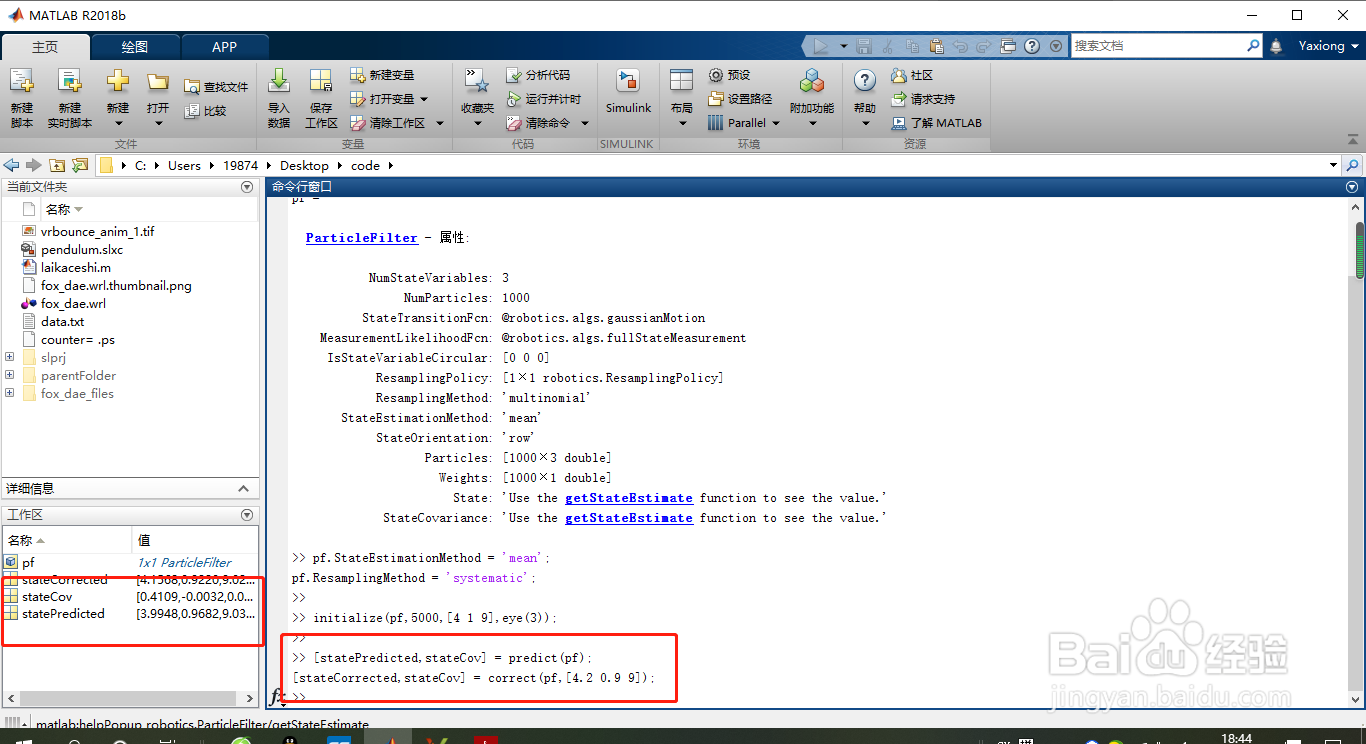
4、%假设测量[4.2款0.9分9] ,运行一个预测和一个正确步骤。
命令行键入:
[statePredicted,stateCov] = predict(pf);
[stateCorrected,stateCov] = correct(pf,[4.2 0.9 9]);
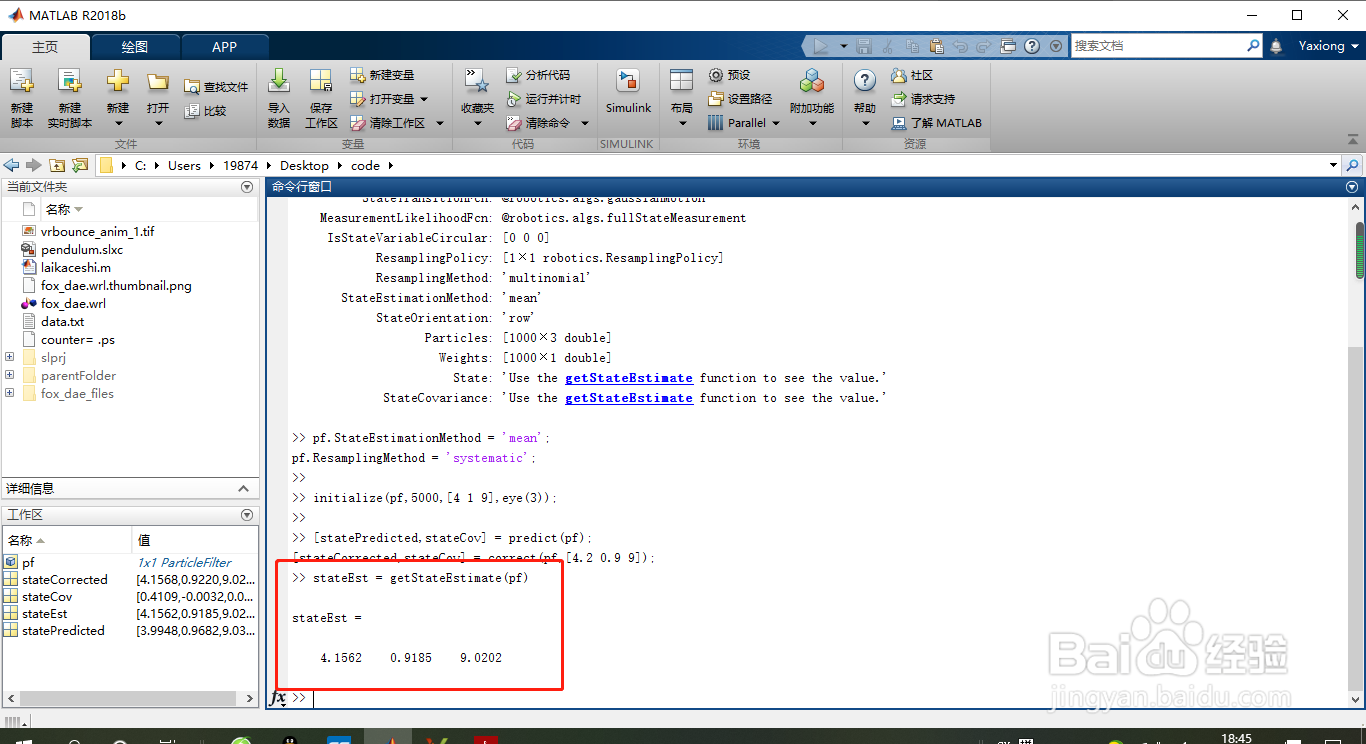
5、%在状态估计方法的基础上,得到最佳状态估计。
命令行键入:
stateEst = getStateEstimate(pf)
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:185
阅读量:159
阅读量:164
阅读量:59
阅读量:22