坦克履带绑定
1、1:履带是由多个履带链组成的;
如图所示:

2、2:创建3个圆柱体,旋转Z轴都旋转90度,排列好位置;
如图所示:

3、3:使用“EP曲线工具”创建曲线;
(1)选中圆柱体,鼠标右键选择“边”;使用“多边形边到曲线”工具(在“修改——转化”处)将选中的边转化成曲线;
(2)选中转化的3个曲线,删除历史;将3个圆柱体删除掉;
如图所示:

4、4:选中被切割曲线和切割曲线,使用“切割曲线”工具(在“曲面模块——编 辑曲线”)将曲线重相交处切割;
(1)删除多余的曲线;
如图所示:


5、5:选中其中靠进的两根曲线,使用“对齐曲线”工具(在“曲面模块——编辑 曲线”)将曲线连接在一起;其他曲线同理;
(1)选最后连接得到的曲线,删除历史;
(2)删除使用过“对齐曲线”工具的曲线,得到最后曲线,命名为:tanke_crv;
如图所示:


6、6:选曲线tanke_crv,使用“重建曲线”工具(在“曲面模块——编辑曲 线”)将曲线平滑,且添加点;
(1)选曲线tanke_crv,使用“开放/闭合曲线”,将曲线闭合;
如图所示:



7、7:制作一个履带链,命名为lv01;
(1)复制出一个履带链,命名lv;
(2)按“ctrl+H”键将履带链lv01隐藏;
(3)选履带链lv,“冻结变换”和删除历史;
如图所示:

8、8:选履带链lv和曲线tanke_crv,使用“连接到运动路径”工具(在“动画模 块——动画——运动路径”);
(1)在“时间滑块”将帧设置为1~~120;
(2)可以点击播放动画,就可以看到履带链在曲线上运动;
(3)若是履带链lv动画时,方向不对,可以给履带链lv的旋转轴设置关键帧来控制它的方向;
如图所示:


9、9:选履带链lv和曲线tanke_crv,使用“创建动画快照”工具(在“动画模块 ——动画”);
(1)选履带链lv,使用“曲线图编辑器”(在“动画模块——窗口——动画编辑器”),将动画速度匀速化,履带链分布均匀;
如图所示:


10、10:履带链太多或太少的话,可以随意选中快照出的一个履带链,调整“增 量”数值可以添加或减少履带链;
如图所示:

11、11:总共需要39个履带链,才可以均匀分布在曲线上;
如图所示:

12、12:删除动画快照的履带链和曲线和履带链lv;
13、13:选履带链lv01,按“shift+H”键显示;
(1)按“shift+D”键,复制出39个履带链;
如图所示:

14、14:创建一根骨骼链,共40个骨骼;
(1)前39个骨骼创建在履带链头部中间,第40个骨骼不用吸附在履带链头部中间;
如图所示:



15、15:“父对象”约束:选中骨骼和该骨骼所吸附的履带链;
(1)“父对象”约束使用39次;
如图所示:

16、16:使用“IK样条线控制柄工具”(在“动画模块——骨架”);
(1)点击第1个骨骼joint1和第40个骨骼joint40,再点击曲线tanke_crv,创建IK;
如图所示:


17、17:选IK,将属性“偏移”进行K帧;
(1)选属性“偏移”,鼠标右键点击“为选定项设置关键帧”;
(2)第1帧为1,第120帧为0;
如图所示:


18、18:打开“曲线图编辑器”(在“窗口——动画编辑器”),将动画速度匀速 化;
如图所示:

19、19:可以点击播放,看看履带链的动画;
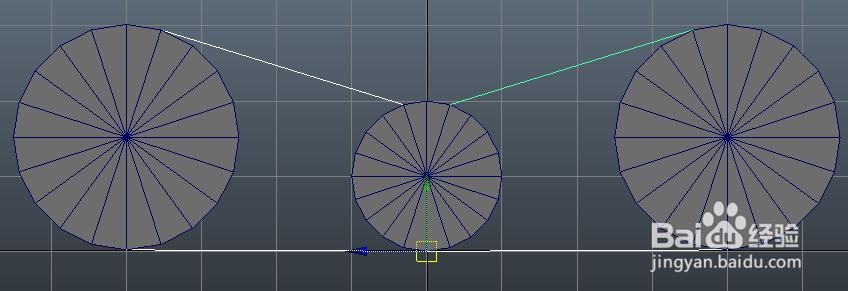
20、20:给履带创建两个轮子,命名;
(1)选轮子,“冻结变换”和删除历史;
如图所示:

21、21:打开“材质编辑器”,将IK和新创建的轮子添加进图表工作区(选中需要 的IK和轮子,在“图表”点击“将选定项添加到图表”);
(1)再创建一个“乘除”节点;
如图所示:

22、22:连接节点,打开“连接编辑器”;
(1)IK:ikhandle的偏移(offset)连接乘除节点的输入1Y(inputY);
(2)选乘除节点,在通道盒修改输入2Y(input2Y)的值为:-1080;
如图所示:


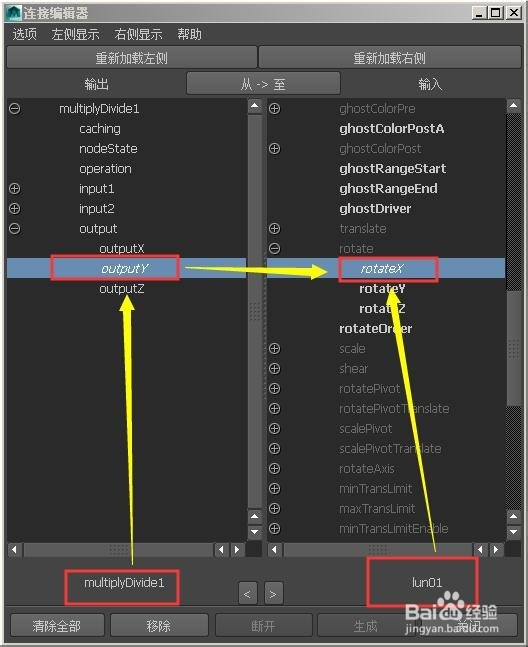
23、23:连接节点,打开“连接编辑器”;
(1)乘除节点的输出Y(outputY)连接轮子lun01的旋转X轴(rotateX);
(2)乘除节点的输出Y(outputY)连接轮子lun02的旋转X轴(rotateX);
如图所示: