UG10.0如何建模滑行头手柄?
1、如下图所示,
打开UG10.0软件,
新建一个空白的模型文件,
在进入到三维模型界面之后,赶紧保存好,
这个文件命名为“方隼”。
2、如下图所示,
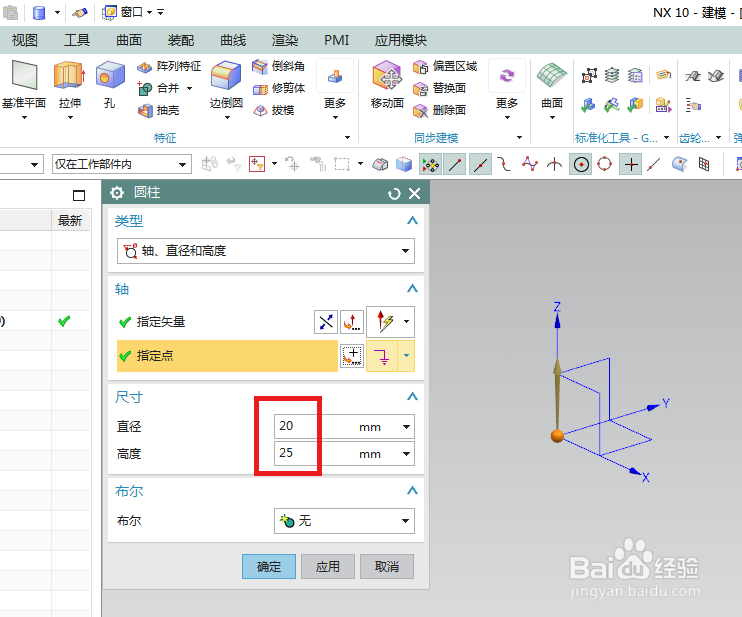
菜单——插入——设计特征——圆柱体,
指定矢量默认Z轴,
指定点默认坐标原点,
设置尺寸,直径20,高度25,
点击确定。
3、如下图所示,
工具栏中的拉伸——基准坐标系中的XY平面,
先后点击它们即可进入草图环境。

4、如下图所示,
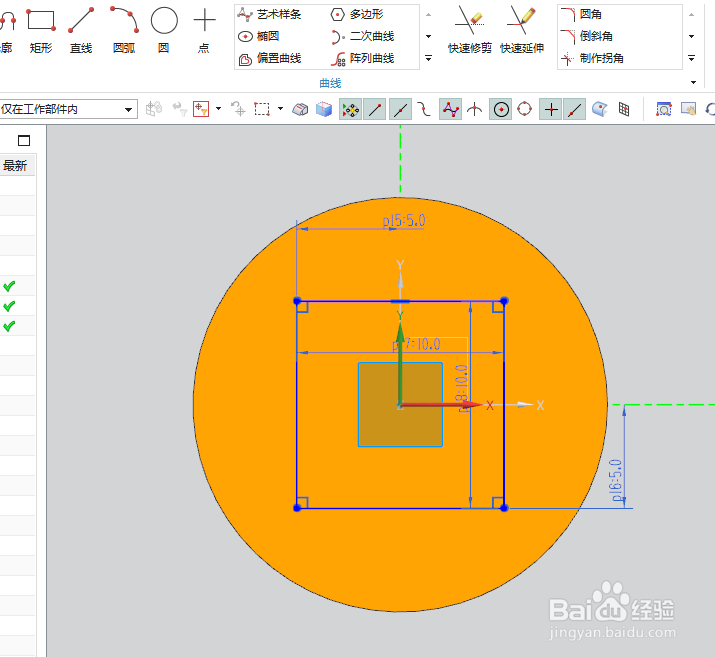
激活矩形命令,随手画一个矩形,
双击修改尺寸,长10,宽10,边线距离坐标轴都是5,
点击完成,退出草图。
5、如下图所示,
退出草图,回到拉伸对话框,
设置限制为从0开始,距离10结束,
点击确定。

6、如下图所示,
工具栏中的拉伸——基准坐标系中的XZ平面,
先后点击上面两步,直接进入草图。
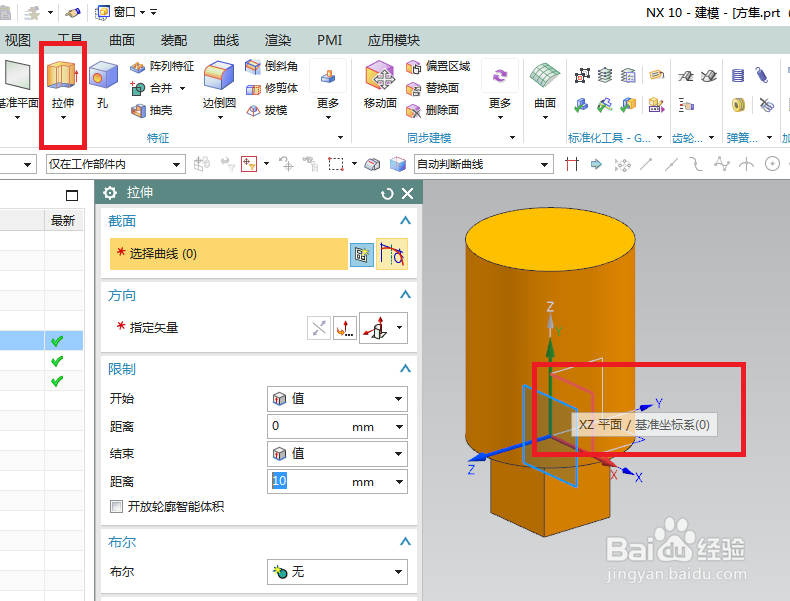
7、如下图所示,
激活圆命令,
画一个圆,
双击修改尺寸,圆心距离纵轴为0,距离横轴为12.5,直径ø8.0,
点击完成,退出草图。

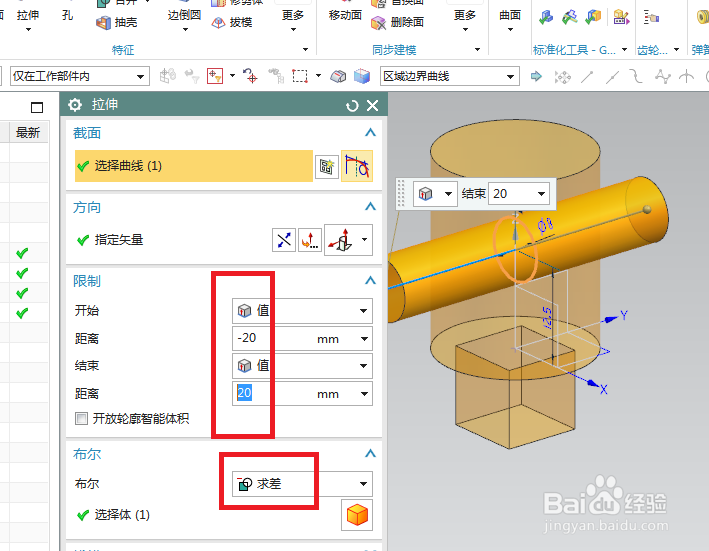
8、如下图所示,
设置限制从-20开始,20结束,
布尔求差,
点击确定。
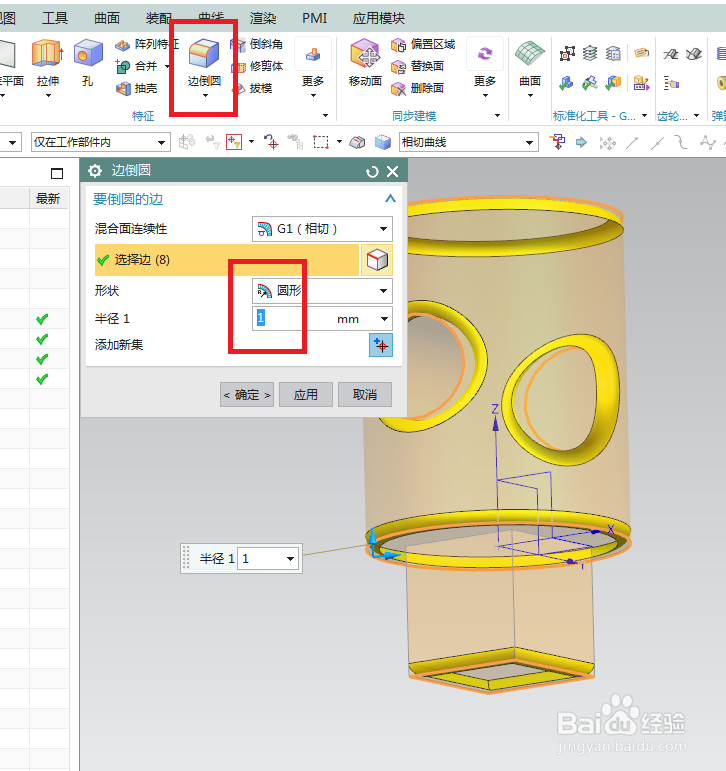
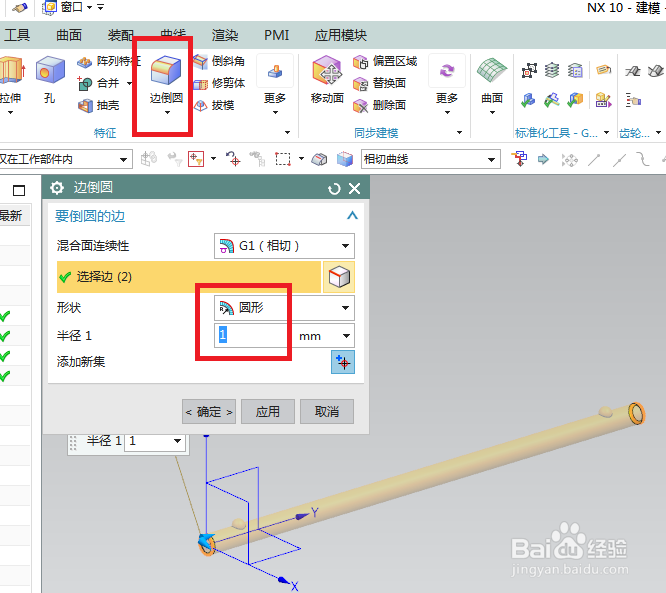
9、如下图所示,
进行边倒圆操作,
首先点击工具栏中的边倒圆图标,激活边倒圆命令,
然后设置半径1为1,
然后选择实体中的边线,
看着下图来选择,不要瞎选,
最后点击确定。
10、如下图所示,
重复第9步操作,
这次对另外四条边线进行边倒圆操作,
半径还是1,
点击确定即可。

11、如下图所示,
将“方隼”保存好,
然后新建一个新的空白模型文件,
并保存好,
这次命名为“滑行柄”。
把它俩保存在一个文件夹中。

12、如下图所示,
菜单——插入——设计特征——圆柱体,
在“圆柱”对话框中设置如下:
指定矢量:Y轴,
指定点:默认坐标原点,
尺寸:直径7.8,高度200,
点击确定。

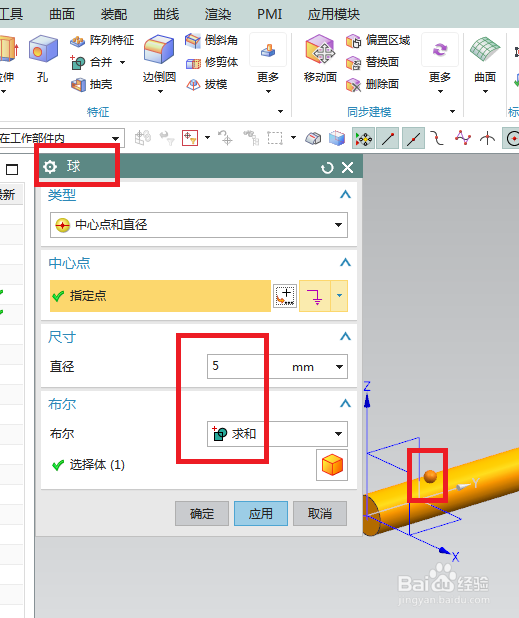
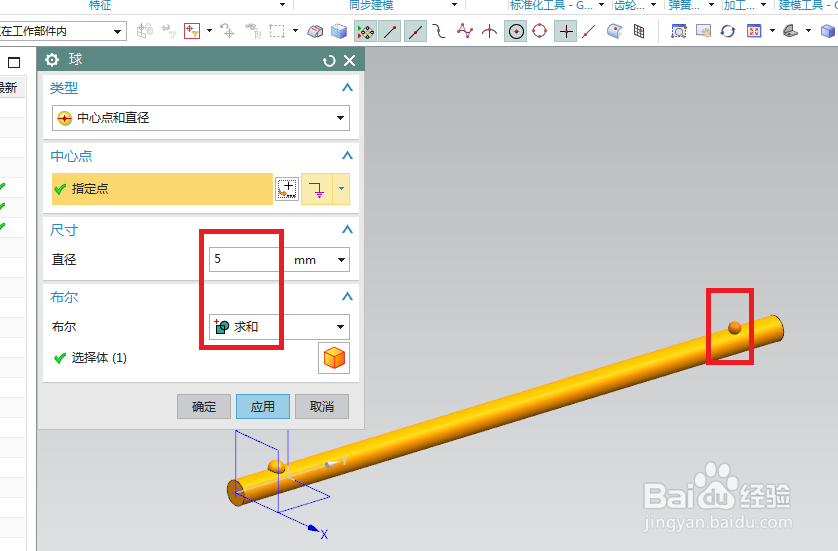
13、如下图所示,
菜单——插入——设计特征——球,
在“球”对话框中设置:
指点点:0,15,3.9,
直径5,
布尔求和,
点击应用。
14、如下图所示,
指定点0,185,3.9,
直径5,
布尔求和,
点击确定
15、如下图所示,
激活工具栏中的边倒圆,
设置半径R1,
选择实体两头边线,
点击确定。
16、如下图所示,
点击工具栏中的“添加”,
在“添加组件”对话框中选择“方隼”,
点击确定。

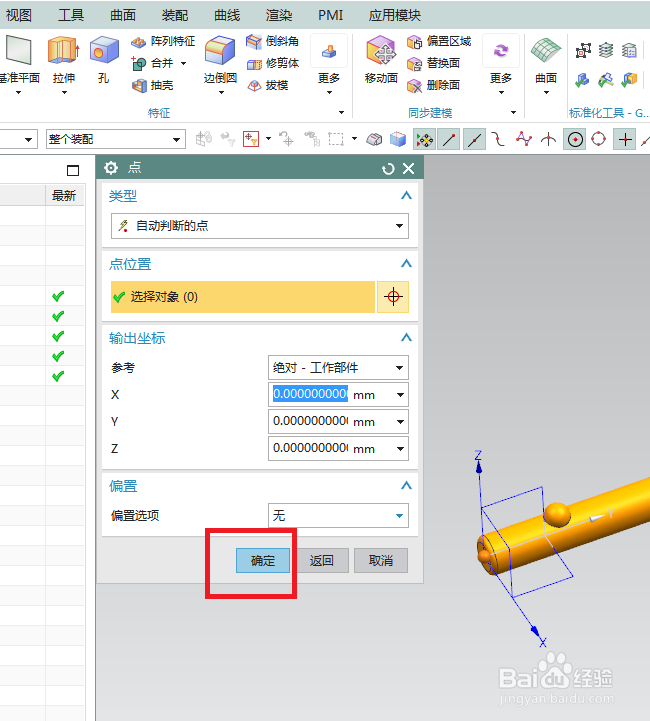
17、如下图所示,
软件弹出一个“点”对话框,
默认的点“0,0,0”,
点击确定。
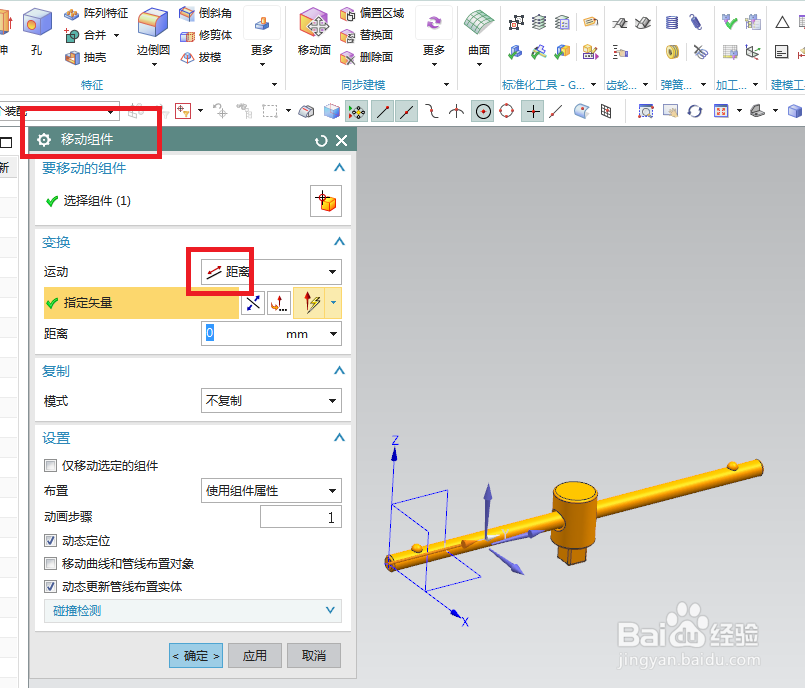
18、如下图所示,
点击工具栏中的“移动组件”,
选择“方隼”,
运动设置为“距离”,
指定矢量,设置距离,
点击确定。
最后的位置效果如下图所示。
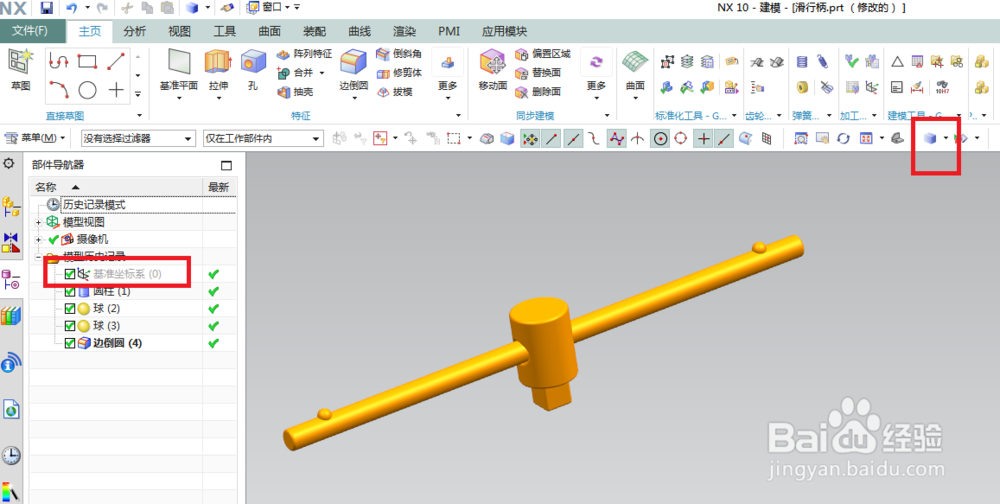
19、如下图所示,
第一幅图,
部件导航器中隐藏基准坐标系,
将显示改成着色。
第二幅图,
渲染工具栏中点击“真实着色”,
设置全局材料钢,
至此,
OK了,
最后的效果如下图所示。