手部绑定:肢体次级骨骼
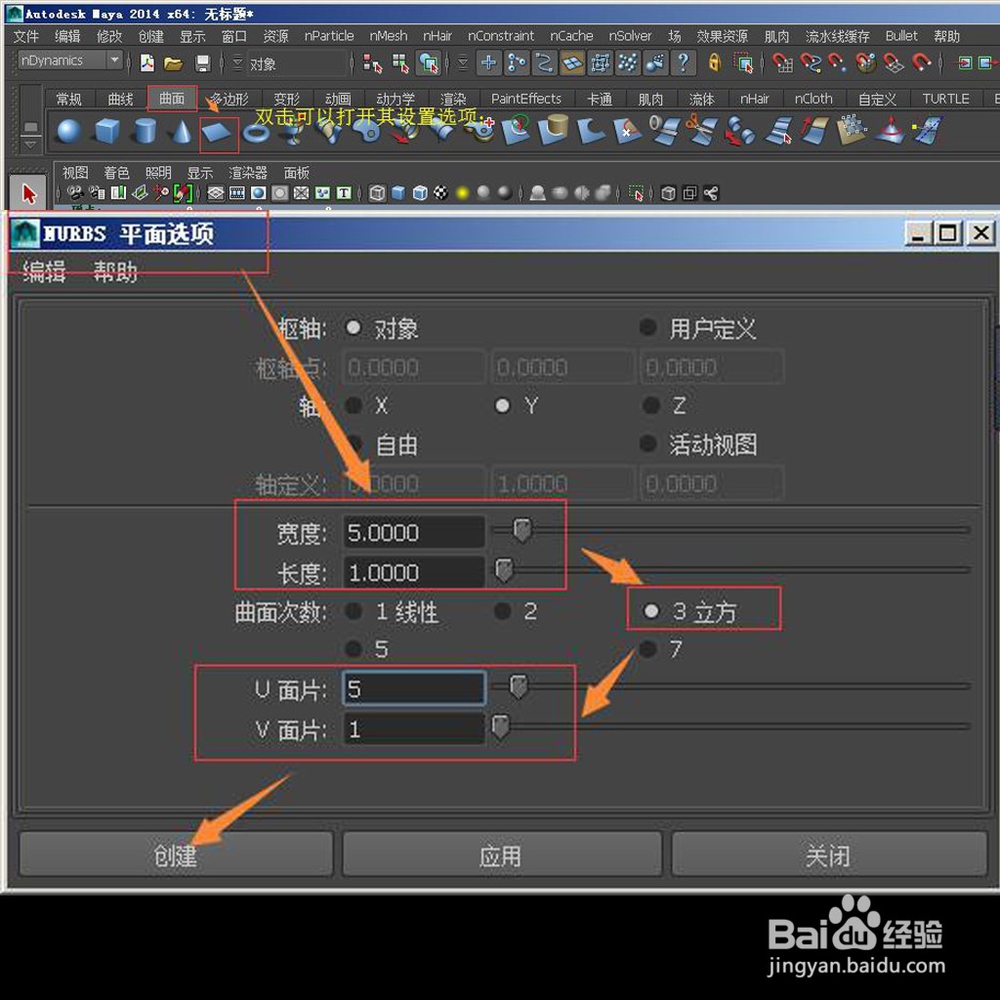
1、1. 创建一个曲面;
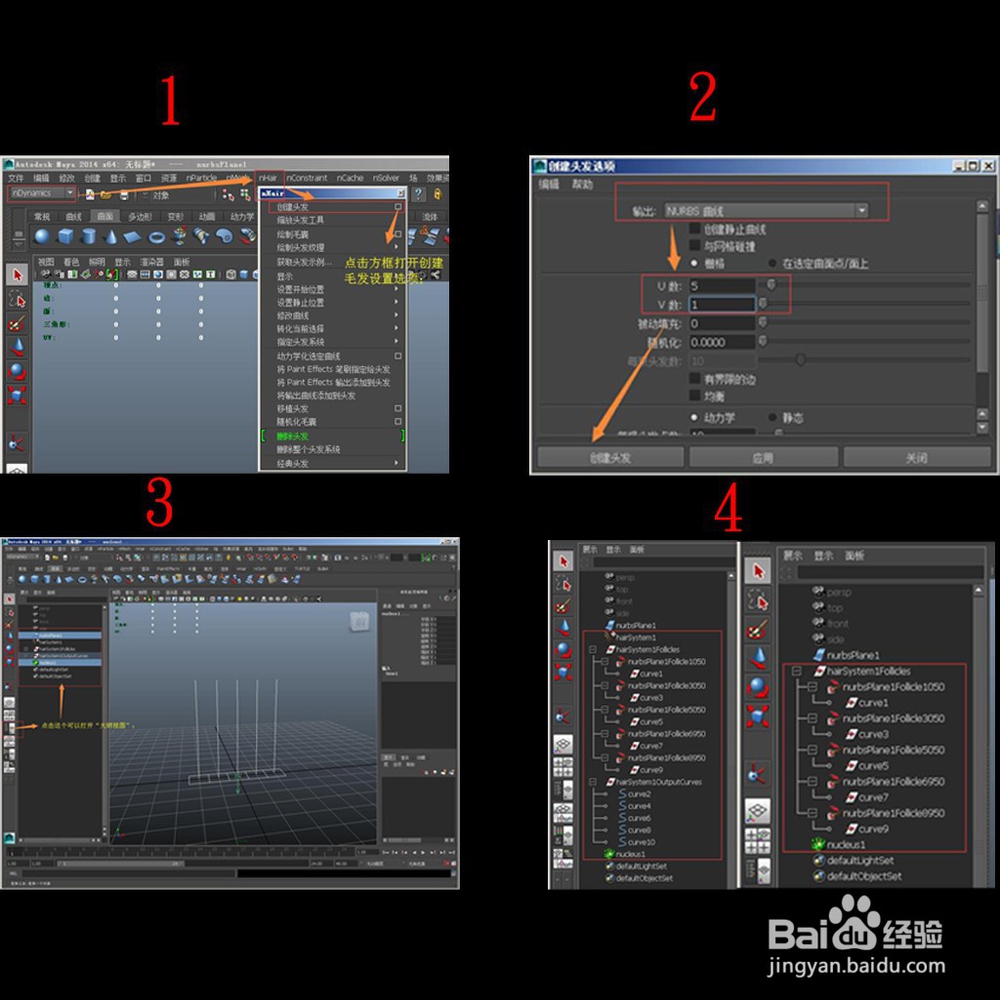
2、2. 使用“创建头发”创建毛发;
《1》创建毛发;
《2》打开“大纲视图”;
《3》因为只需要毛囊,所以删除毛囊外的曲线;
3、3:分别创建5个单独骨骼;
(1)命名:命名时前缀名都加上seg_;
(2)将5个骨骼按“P”键给毛囊命名为曲线的组当子物体;
(3)将骨骼的位移数值清零,骨骼就会吸附在对应毛囊上;
(4)给创建的骨骼新建个图层,颜色为黄色;

4、4.创建一套辅助骨骼,半径为0.8;
《1》命名:
(1)seg_01和seg_01_end;
(2)seg_02;
(3)seg_03和seg_03_end;
《2》给辅助骨骼新建个图层,颜色为蓝色;
《3》
(1)将骨骼seg_01吸附到曲面的左边上,seg_01_end吸附到第1个毛囊上;
(2)将seg_02 吸附到第3个毛囊上;
(3)将seg_03吸附到曲面的右边上,将seg_03_end吸附到第5个毛囊上;

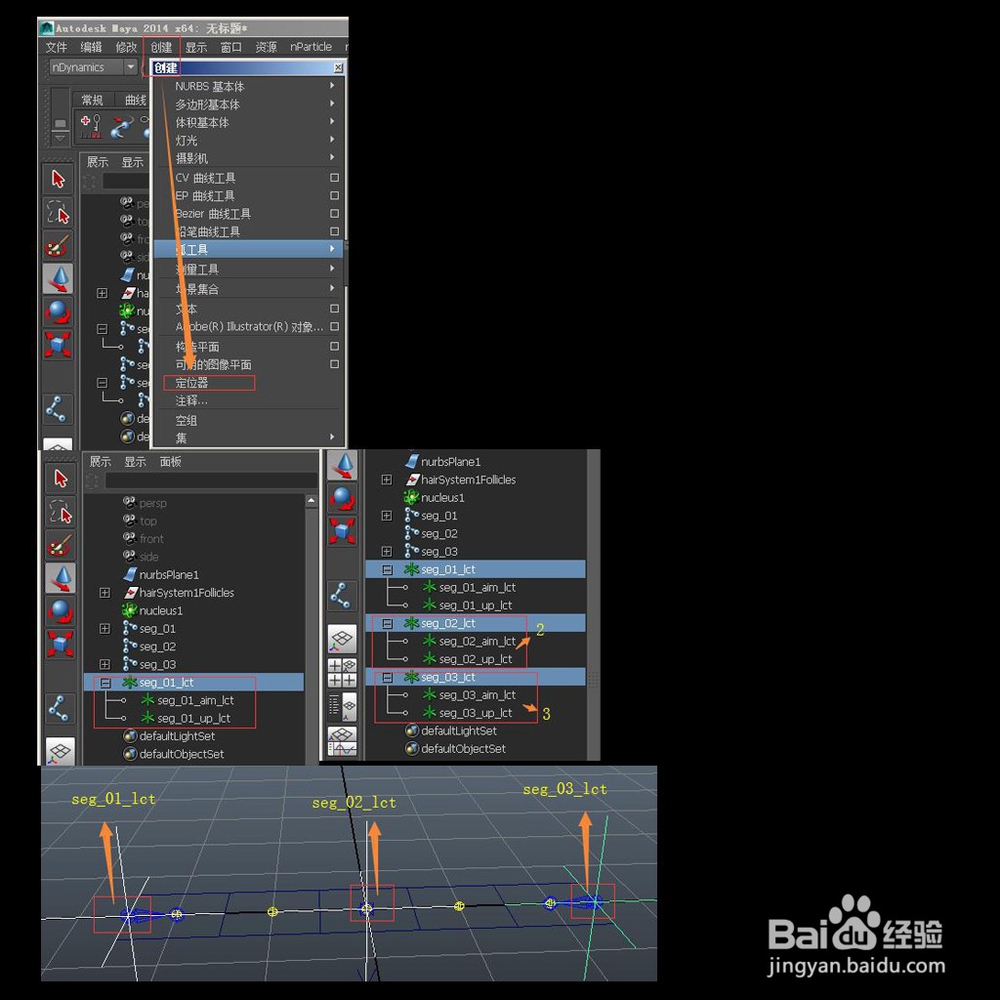
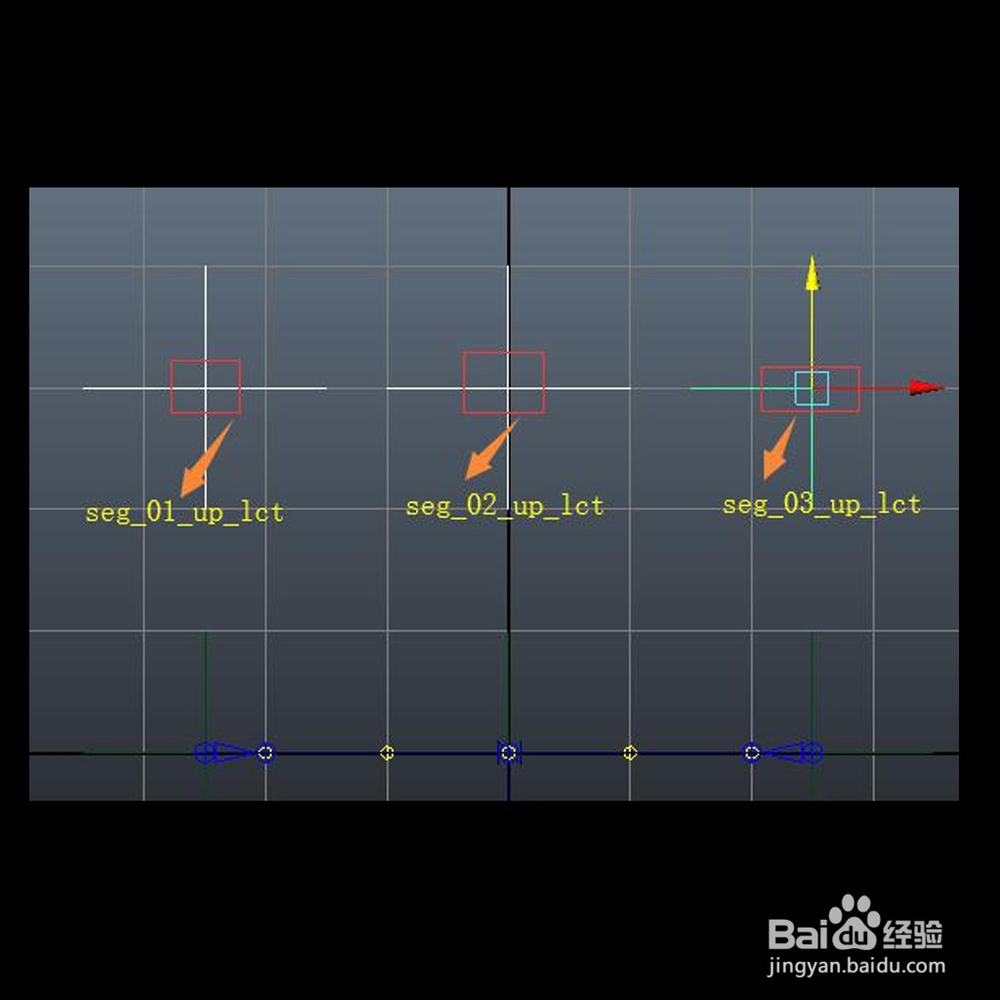
5、5.创建定位器;
《1》创建一个定位器,再复制2个定位器,将复制的2个定位器按“P”键给第 一个定位器做子物体,命名:seg_01_lct和”seg_01_aim_lct”+”seg_01_up_lct”;
《2》选中定位器seg_01_lct,再复制2次,修改命名为:
(1)seg_02_lct和”seg_02_aim_lct”+”seg_02_up_lct’’ ;
(2)seg_03_lct和”seg_03_aim_lct”+”seg_03_up_lct”;
《3》
(1)将seg_01_lct吸附在第1个毛囊上;
(2)将seg_02_lct吸附在第3个毛囊上;
(3)将seg_03_lct吸附在第5个毛囊上;
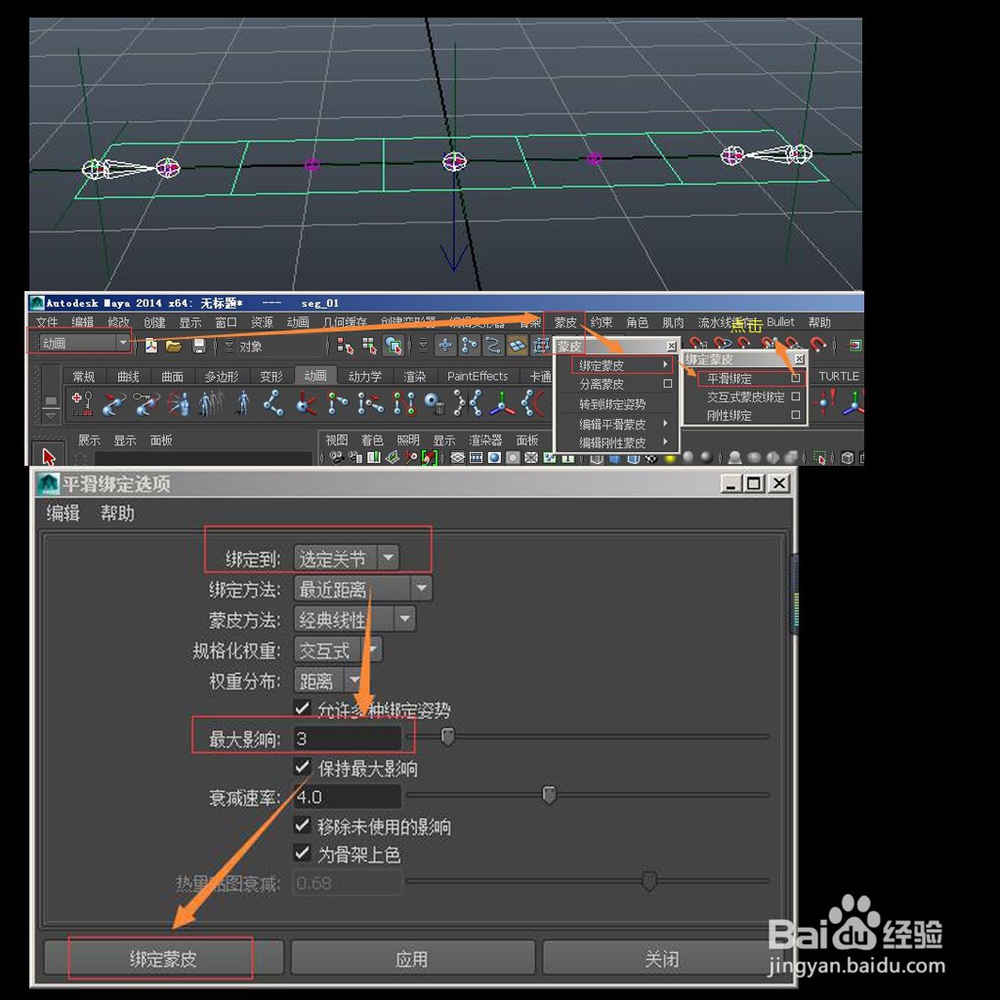
6、6.选中辅助骨骼seg_01+seg_02 +seg_03和曲面;
(1)“平滑蒙皮”;
(2)蒙皮后可以选择骨骼进行测试;
7、7.将定位器seg_01_up_lct+seg_02_up_lct+seg_03_up_lct向上平移3个单位;
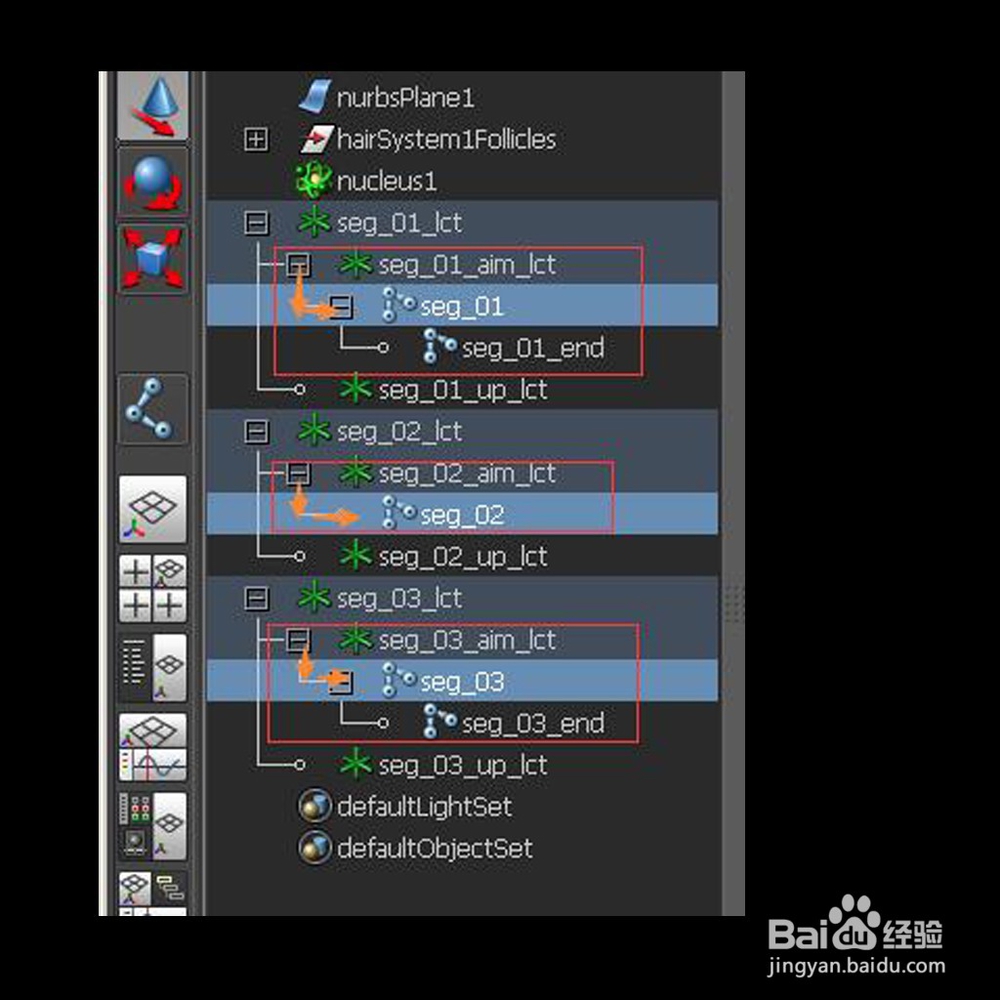
8、8.按“P”键;
(1)将辅助骨骼seg_01和seg_01_end给定位器seg_01_aim_lct做子物体;
(2)将辅助骨骼seg_02 给定位器seg_02_aim_lct做子物体;
(3)将辅助骨骼seg_03和seg_03_end给定位器seg_03_aim_lct做子物体;
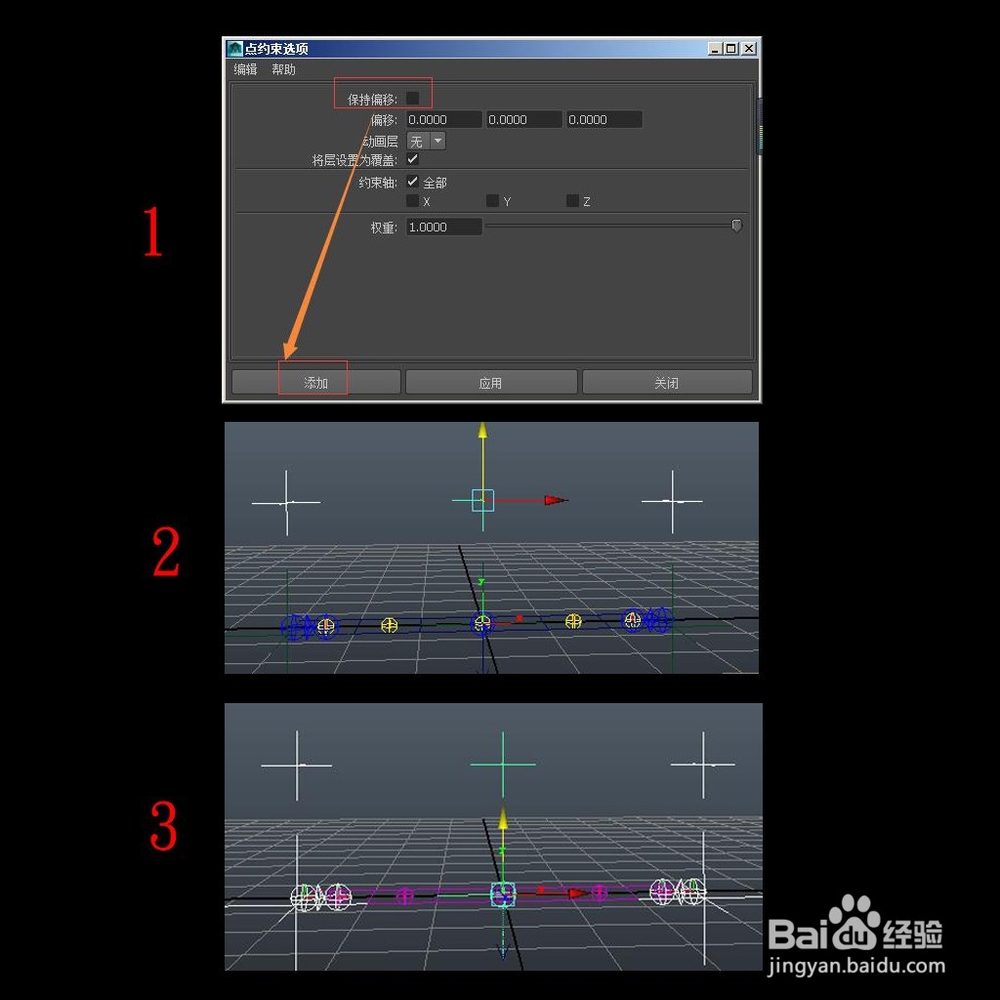
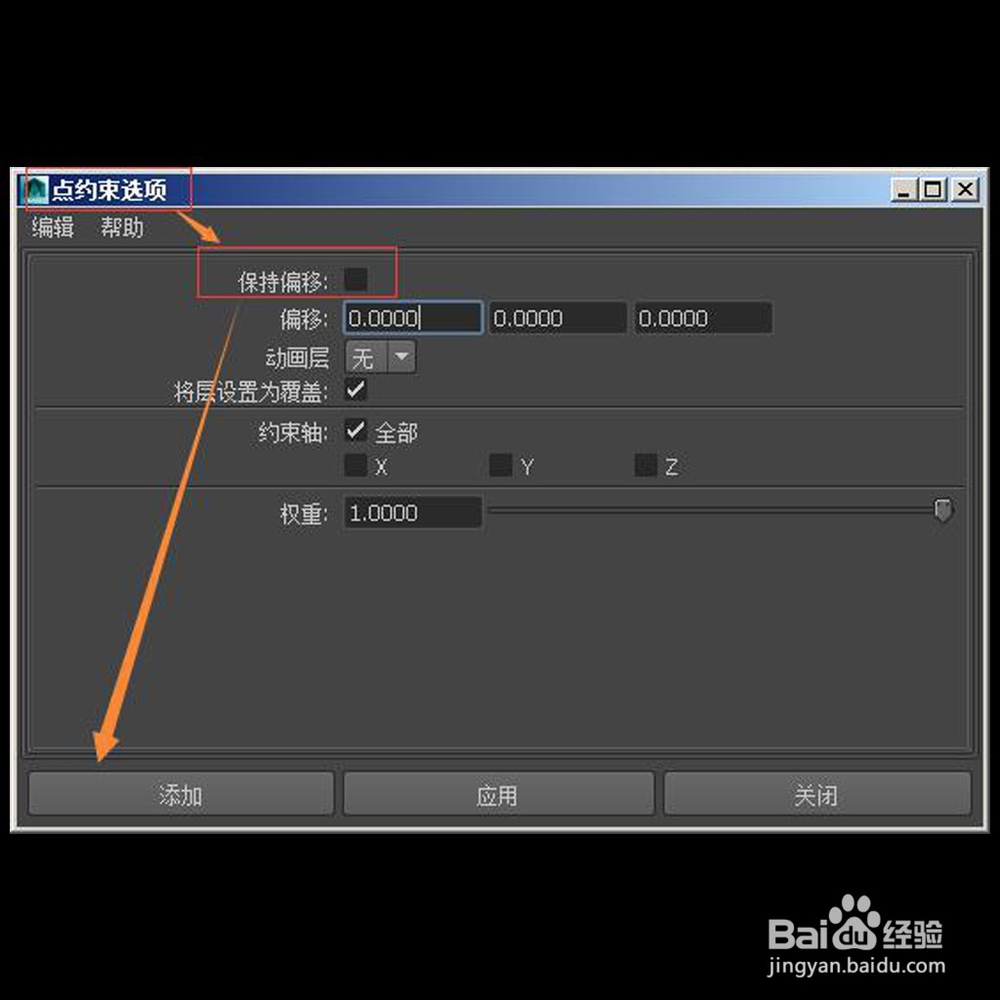
9、9.定位器的“点”约束:
《1》选中seg_03_up_lct+seg_01_up_lct+seg_02_up_lct ,“点”约束;
《2》seg_03_lct+seg_01_lct+seg_02_lct,“点”约束;
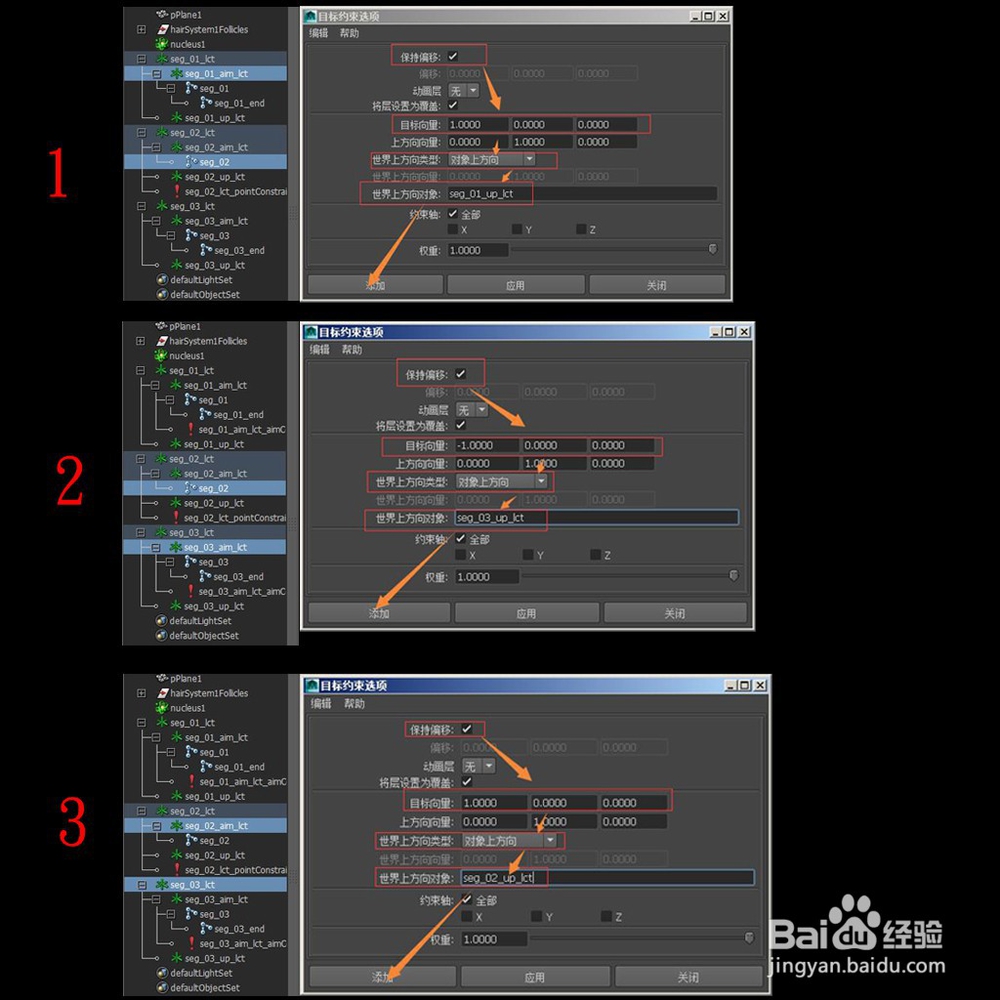
10、10.“目标”约束:
《1》选中骨骼seg_02和定位器seg_01_aim_lct;
《2》选中骨骼seg_02和定位器seg_03_aim_lct;
《3》选中定位器seg_03_lct和定位器seg_02_aim_lct;
11、11.因为动的时候,曲面看起来不是很圆滑:点击曲面,选择“点”,在“窗口”的“常规编辑器”的“组件编辑器”中,调整“点”的“平滑蒙皮”;
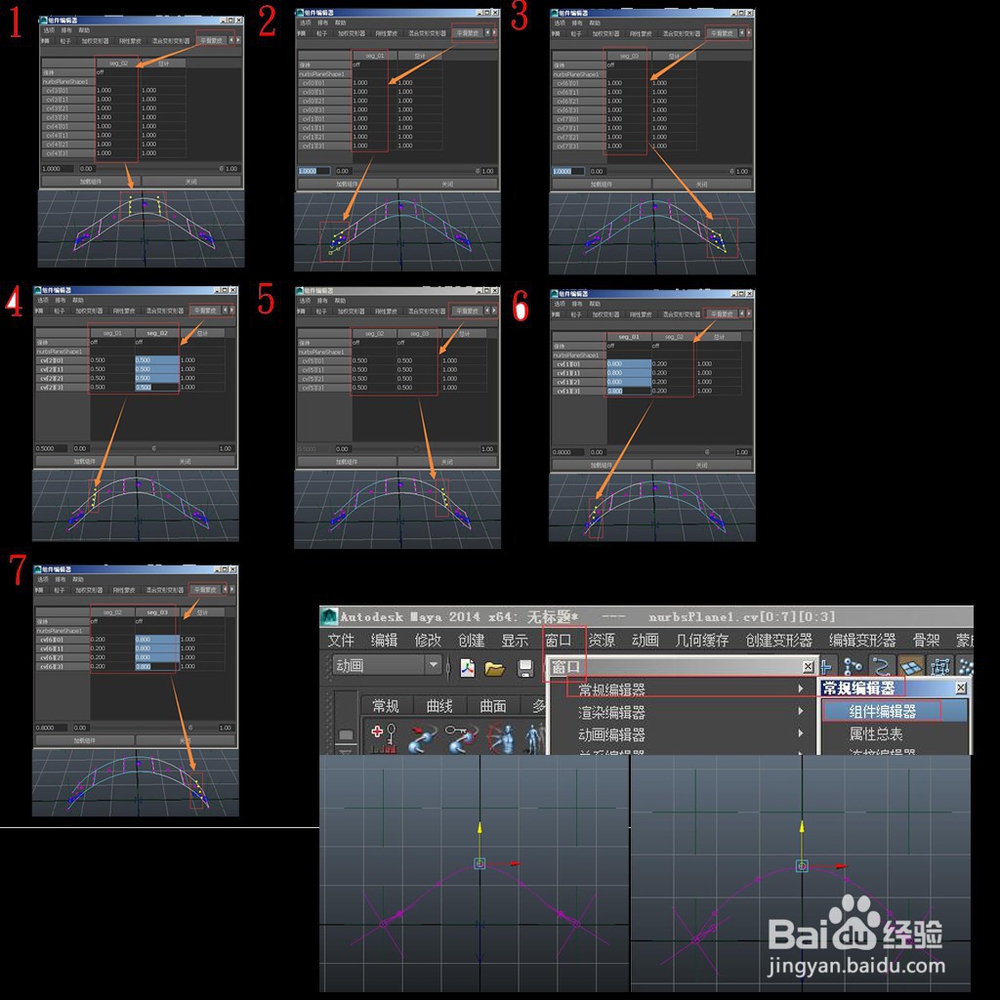
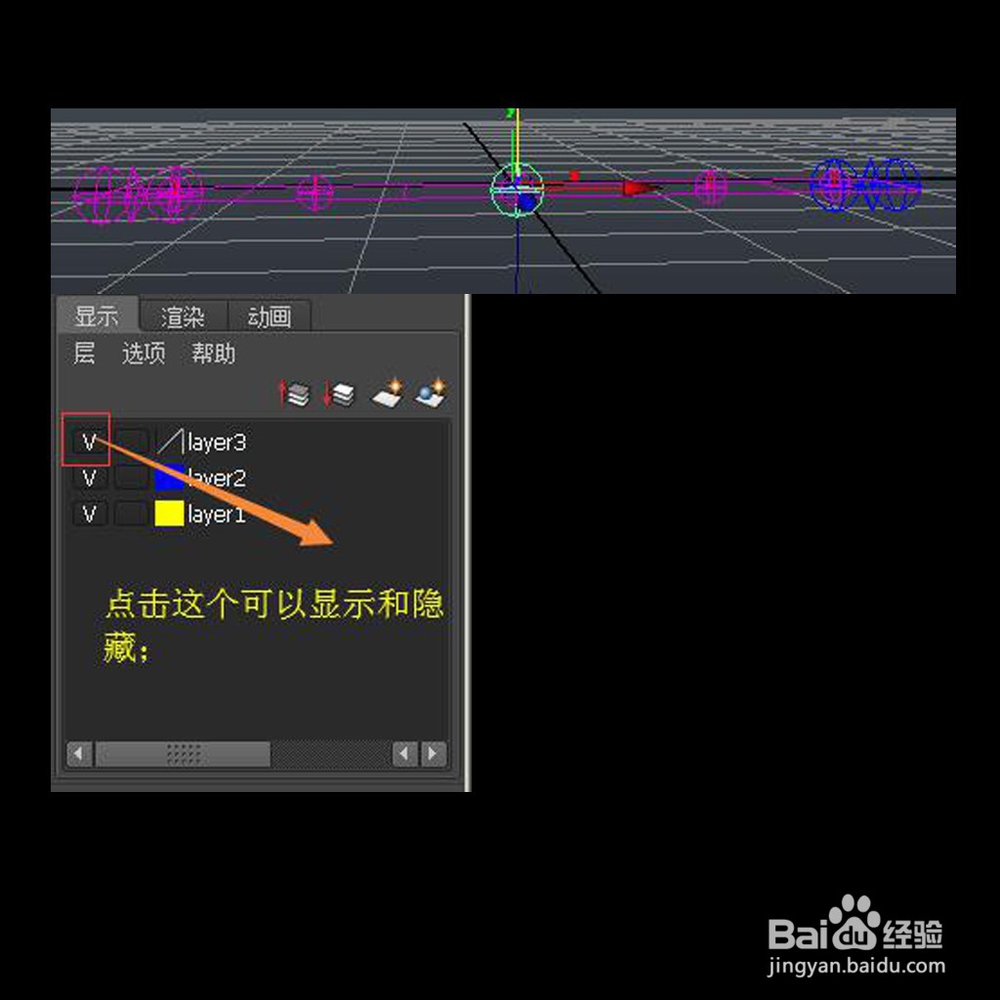
12、12.隐藏所有定位器:
(1)按“shift”键选中所有定位器,按“ctrl+H”键,可以隐藏;
(2)给定位器创建一个图层,关闭显示,可以隐藏;
13、13.选中曲面,在“显示”的“对象显示”中,点击“模板”;

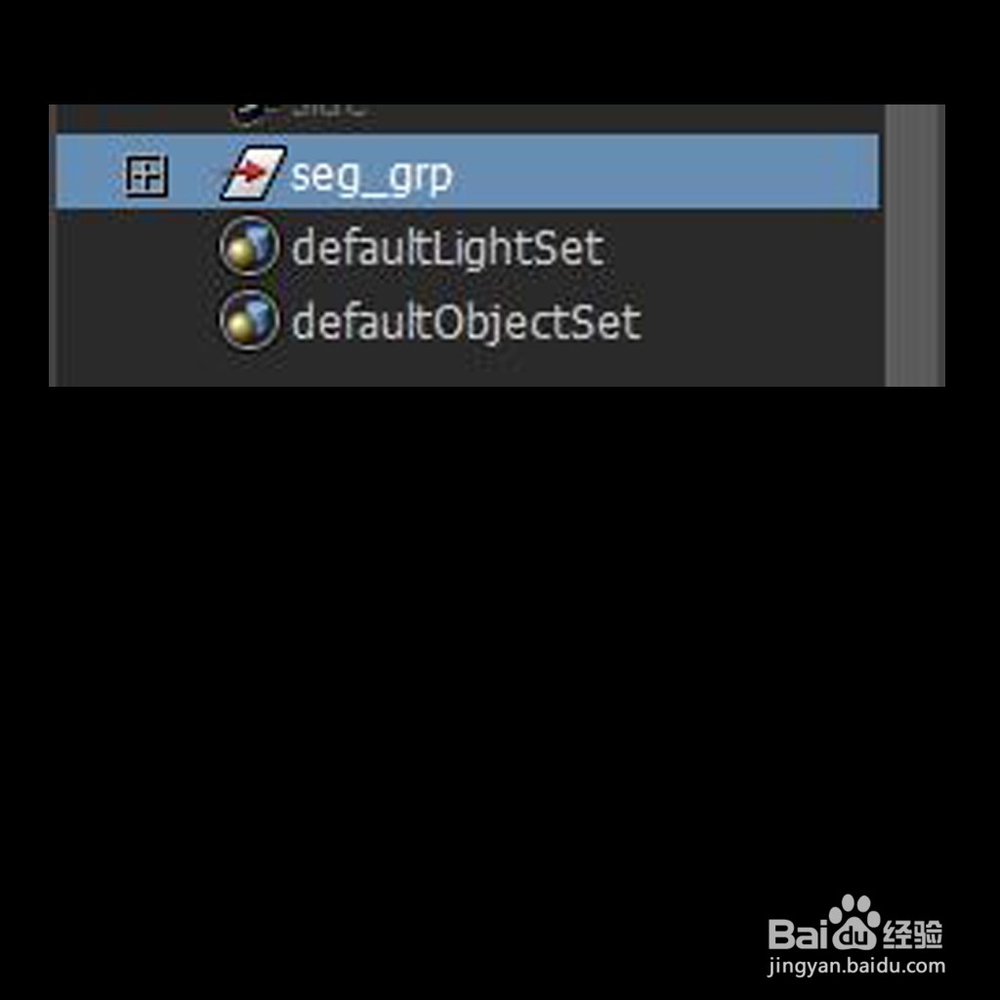
14、14.选中所有,成组,命名为seg_grp;
15、15.保存文件“~~~.ma格式‘’,命名为seg;
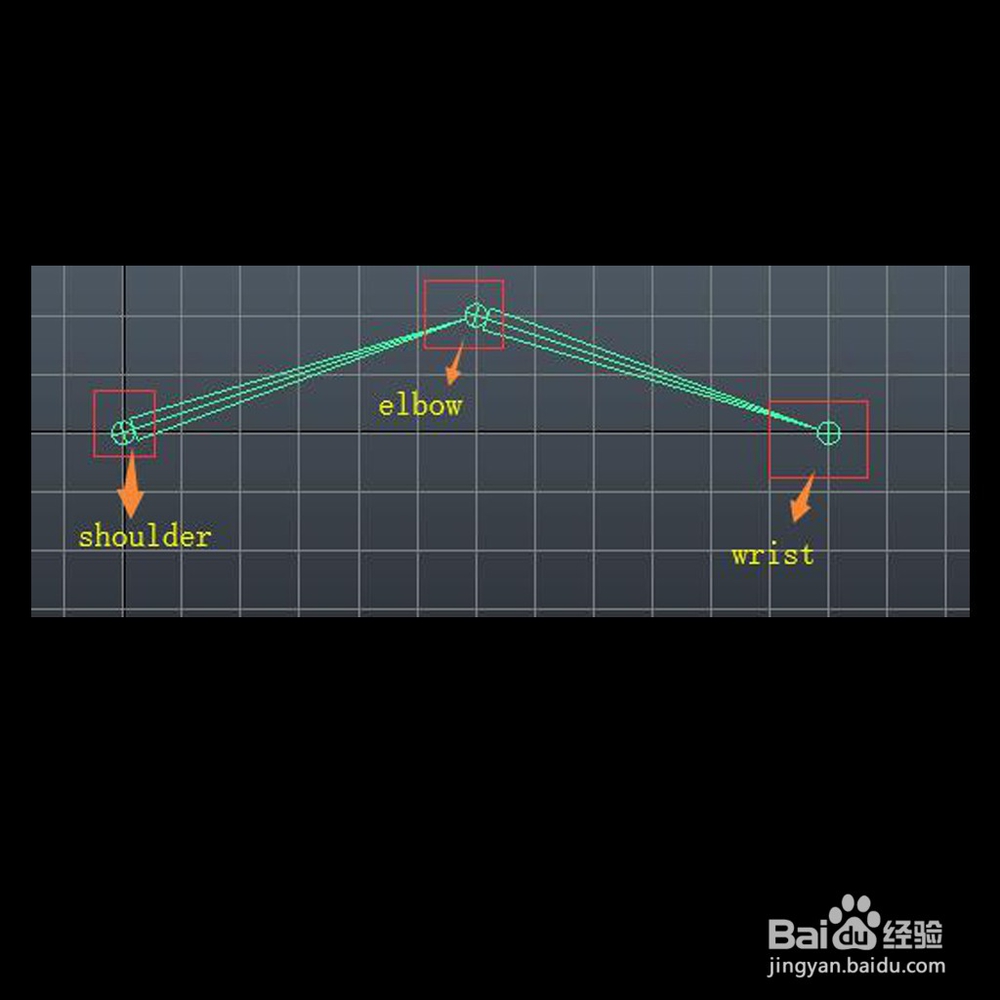
1、16:创建一节手臂骨骼,命名;
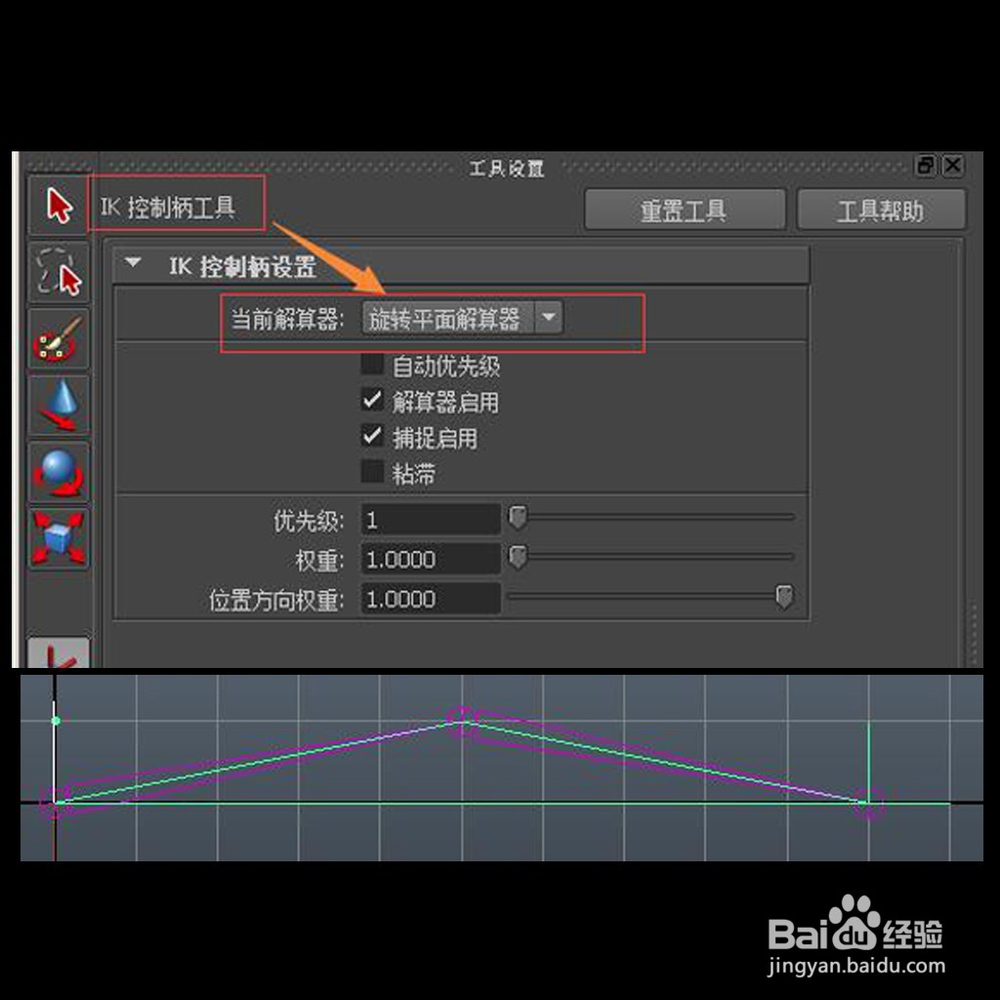
2、17:使用“IK控制柄工具”,创建IK;
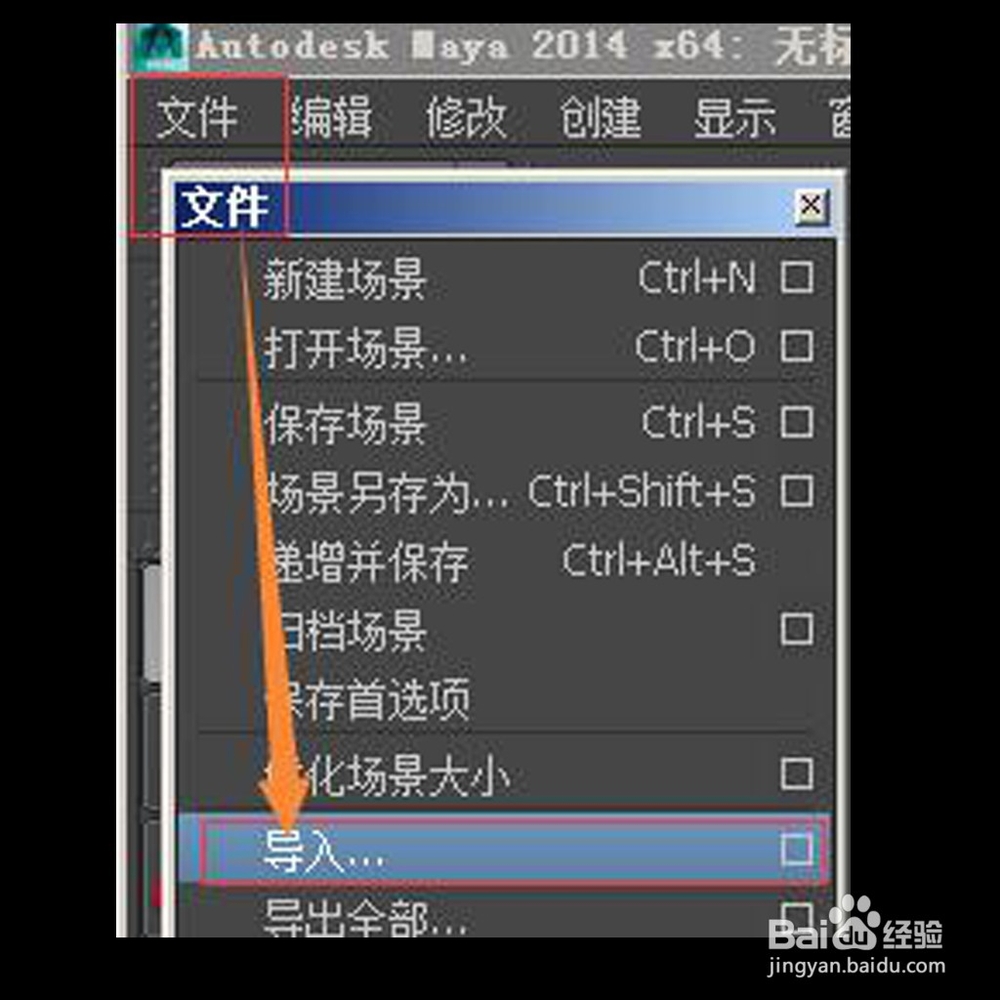
3、18:导入之前保存的“seg”文件;
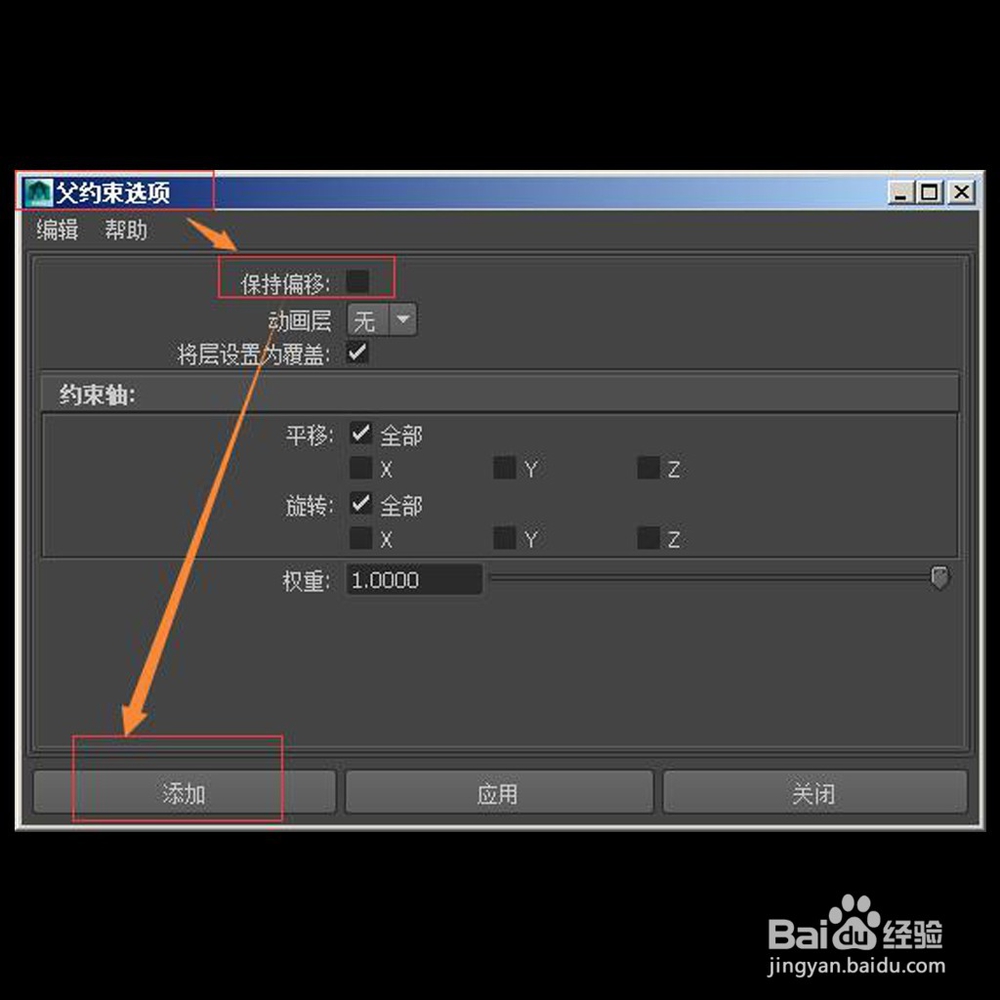
4、19:“父对象”约束;
(1)选中骨骼shoulder和定位器seg:seg_01_lct,“父对象”约束;
(2)选中骨骼elbow和定位器seg:seg_03_lct,“父对象”约束;
且再删除其“父对象”约束节点;
5、20:再导入“seg”文件;
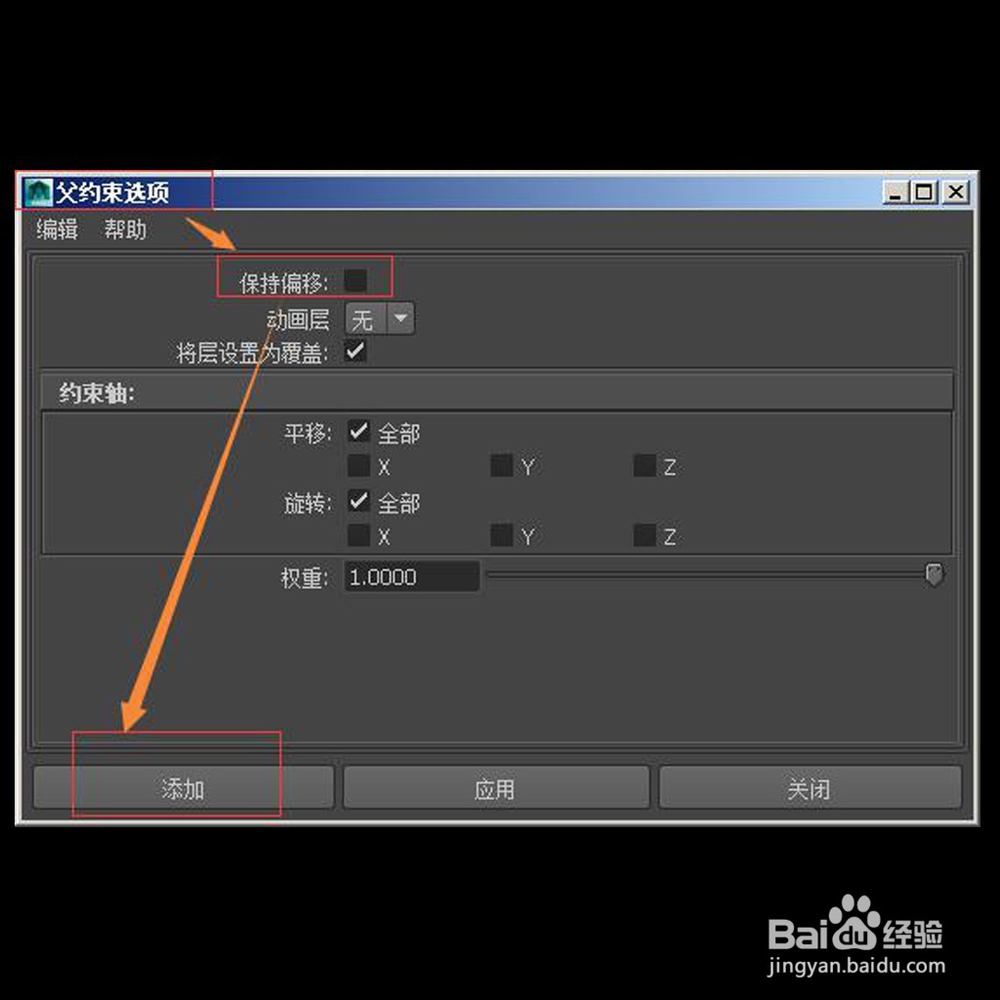
6、21:“父对象”约束;
(1)选中骨骼wrist和定位器seg1:seg_03_lc,“父对象”约束;
(2)选中骨骼elbow和定位器seg1:seg_01_lc,“父对象”约束;
且再删除其“父对象”约束节点;
7、22:“点”约束;
(1)骨骼elbow 和定位器seg:seg_03_lct,“点”约束;
(2)骨骼elbow和定位器seg1:seg_01_lc,“点”约束;
8、23:可以选择IK或定位器进行控制,实验是否有效果;