相机标定:张正友标定法求解原理
1、平面标定板和图像之间的单应性矩阵H:
一般以平面标定板上左上角的点为世界坐标系的原点,其XOY平面与标定板平面重合;
故标定板上的点其Z=0;
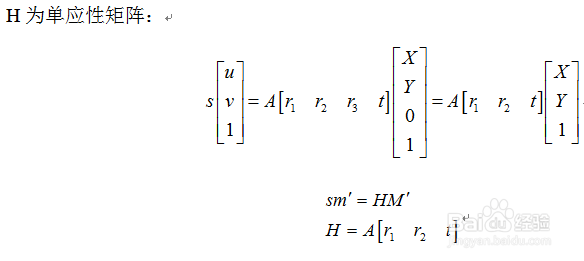
则透镜模型可变为:
H为单应性矩阵:
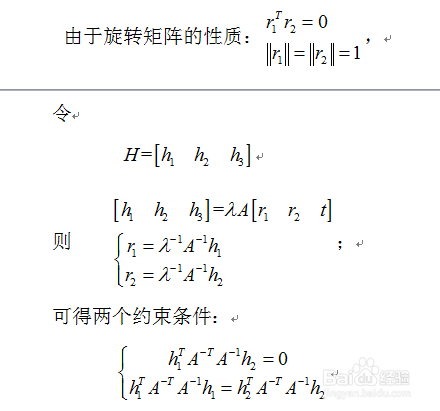
2、求内参的约束条件
如下所示:
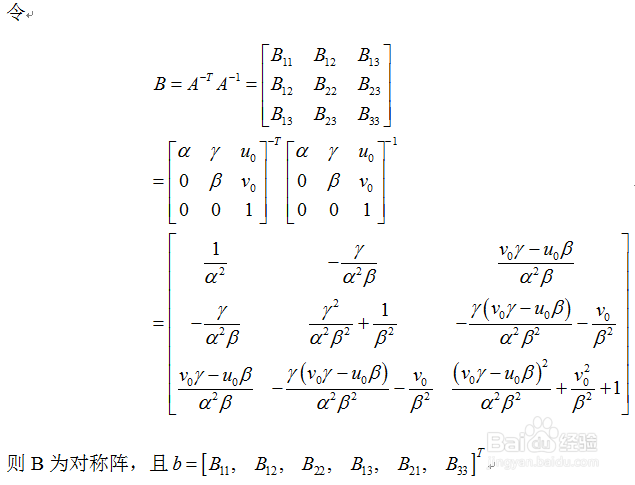
3、闭合解(closed-form solution)方法:
如下所示
4、约束条件转换
如下所示
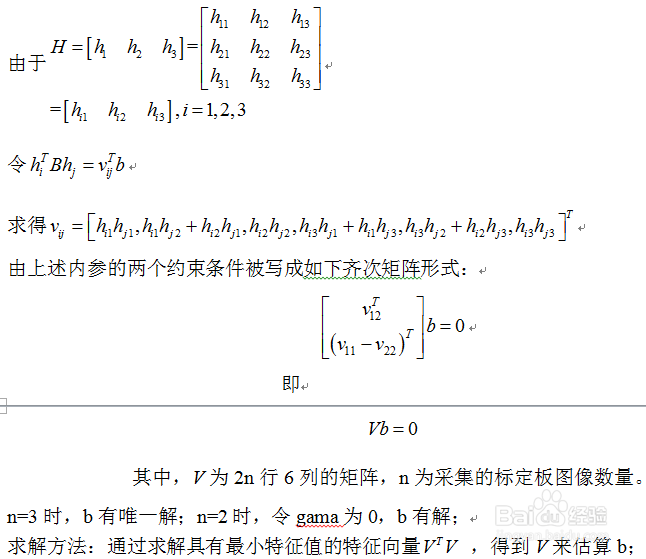
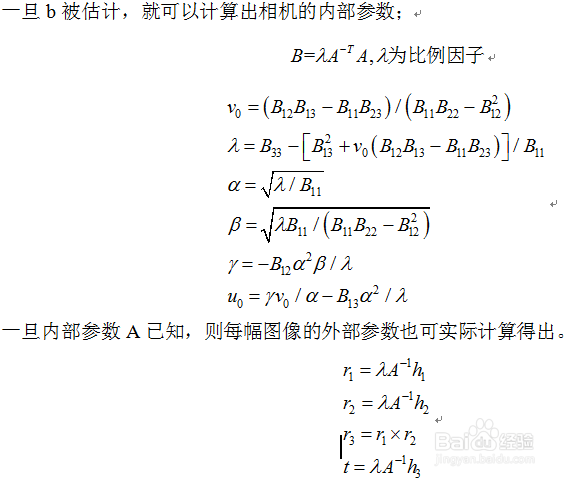
5、相机内部参数求解:
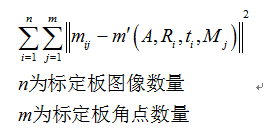
6、最大似然估计优化
由最大似然估计的非线性优化方法对参数进行优化。
7、张正友标定方法总结
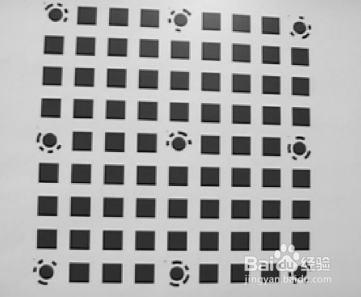
(1)设定标定板
(2)旋转标定板或相机,采集标定板图像
(3)检测图像特征点
(4)估计5个相机内参,和外部参数
(5)参数优化
声明:本网站引用、摘录或转载内容仅供网站访问者交流或参考,不代表本站立场,如存在版权或非法内容,请联系站长删除,联系邮箱:site.kefu@qq.com。
阅读量:83
阅读量:169
阅读量:72
阅读量:113
阅读量:171