使用URT-1控制飞特舵机上手教程
1、1,将URT-1驱动板与电脑连接
2,安装驱动,参阅文件CH340驱动,检查设备管理器串口号。
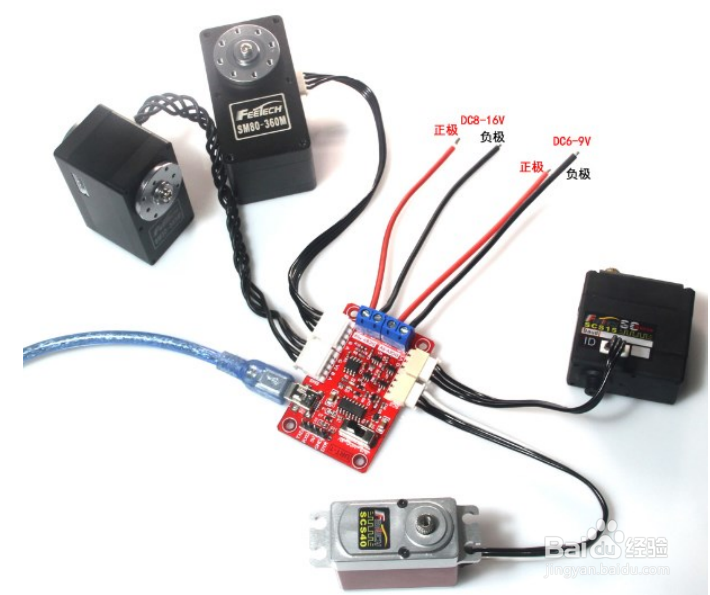
3,舵机连接URT-1驱动板,驱动板接电源,参考下图:
2、4,打开FD软件进行调试:选择端口号(设备管理器对应的串口号)-波特率(默认为1000000或115200)-打开-搜索。
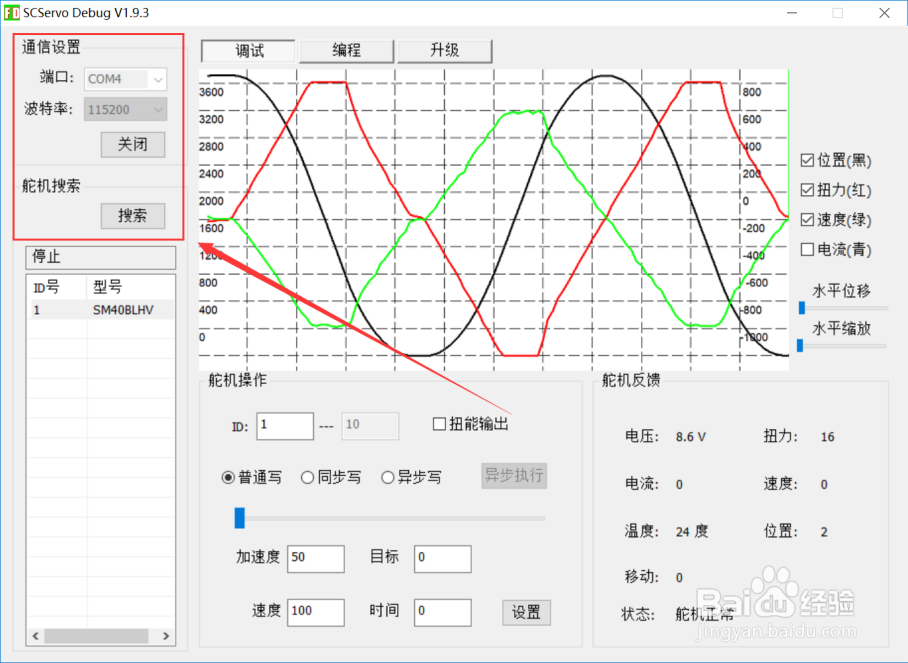
3、5,点击舵机型号,在加速度和速度输入数值,(没有加速度功能的舵机只需要输入速度的数值即可),点击设置,拉动滑杆,观察舵机动力轴转动。
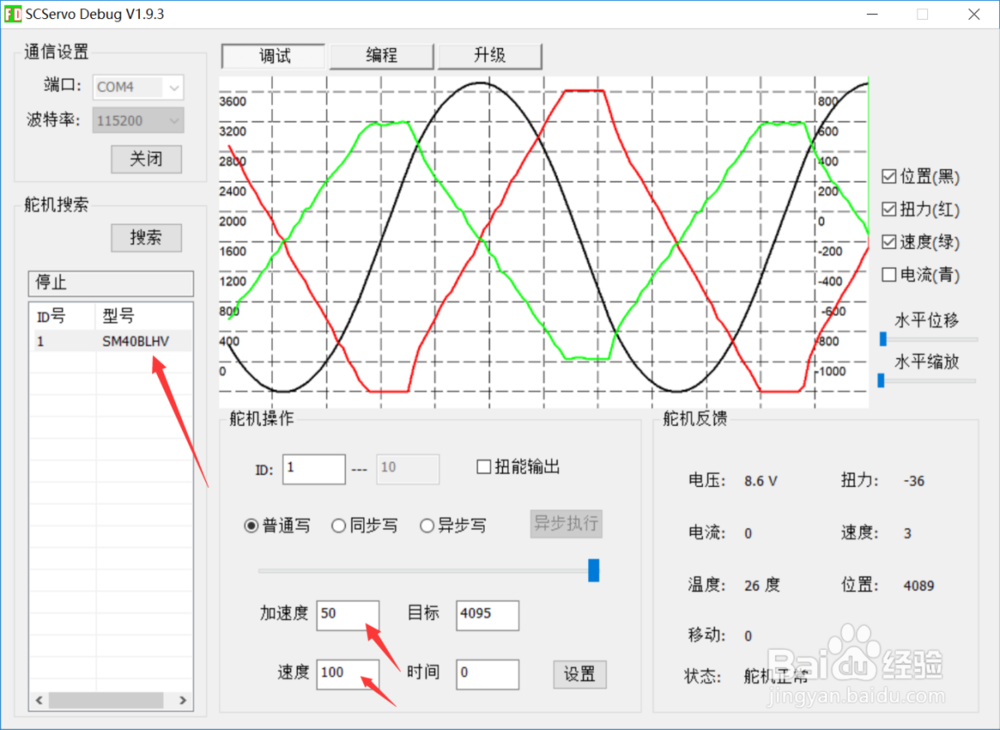
1、6,关于FD更详细的介绍可参阅SCServo-Debug使用手册17.4.6.pdf(百度经验:SCServo-Debug使用手册)
7,修改舵机参数可点击编程。
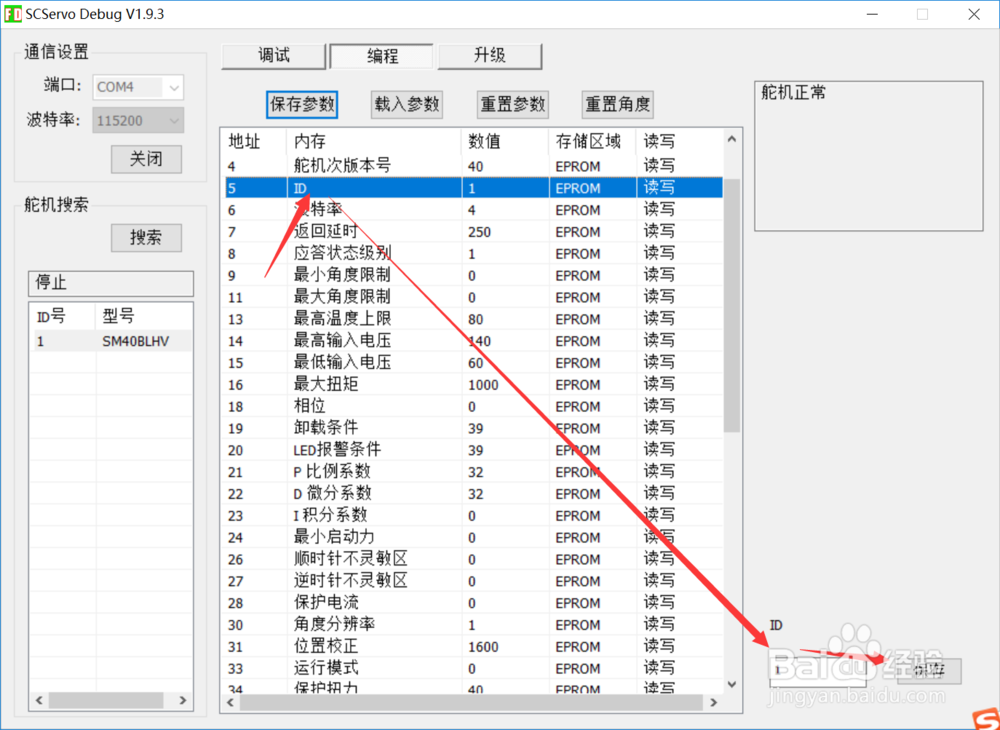
2、8,如何修改舵机参数?点击ID一栏,在右下角输入数字,再点击保存即可。
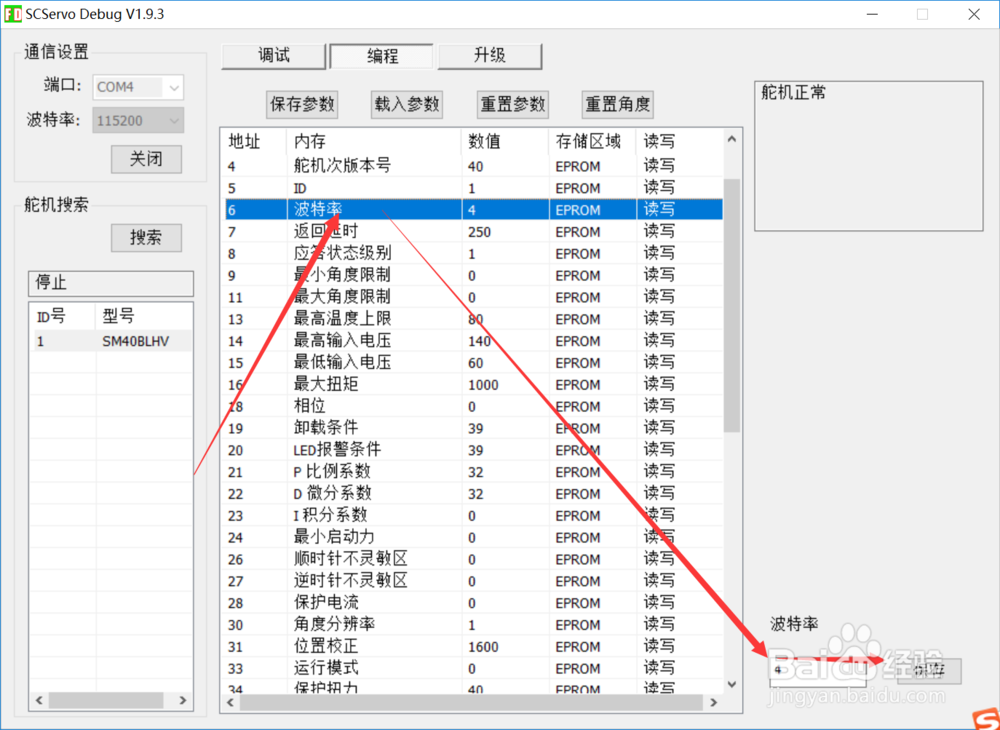
3、9,如何修改舵机波特率?点击波特率一栏,在右下角输入数字,再点击保存即可。
对应比特率:
0对应1000000 1对应500000 2对应250000 3对应128000
4对应115200 5对应76800 6对应57600 7对应38400
1、10,同样的方式修改:
①修改多圈转动:
地址:30 角度分辨率 1代表正转1圈, 反转1圈
2 代表正转2圈,反转2圈
。。。不能大于100
②开放pid参数调节接口,地址:21-23
③零位校准功能(位置校正),地址:31
④多工作模式 (0位置控制模式和1恒速电机模式,2PWM电机模式)
⑤自卸力保护 过载保护,地址:34-36
过热保护,地址:13
过流保护,地址:28
过压保护,地址:14-15
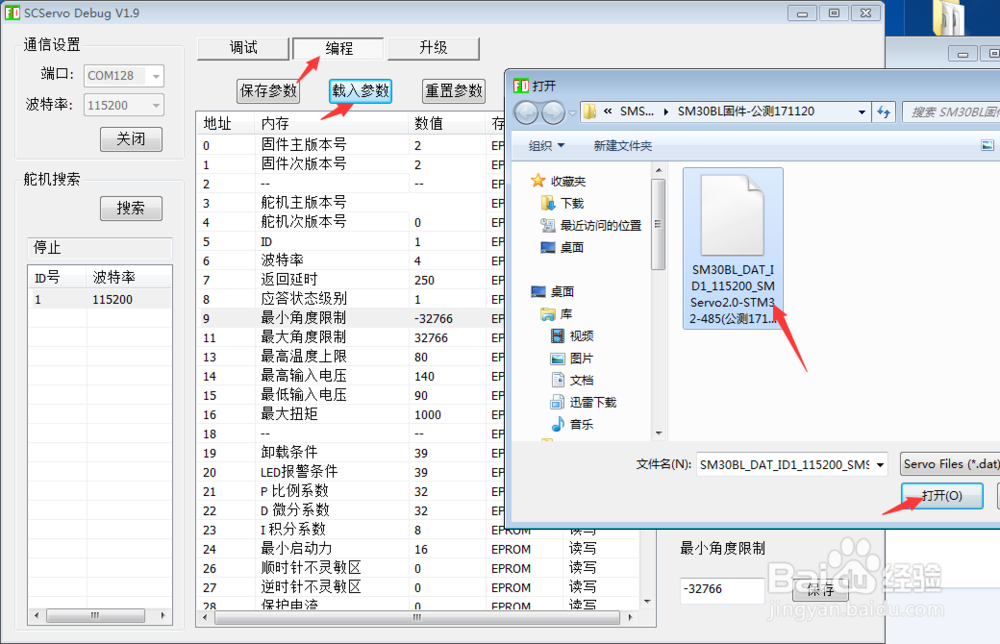
11,如何载入舵机参数:
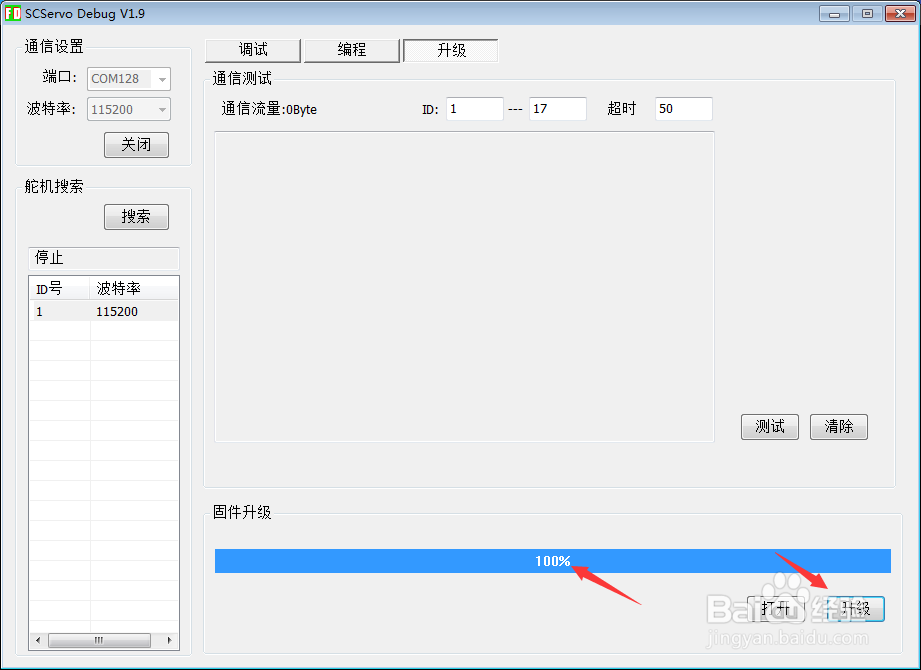
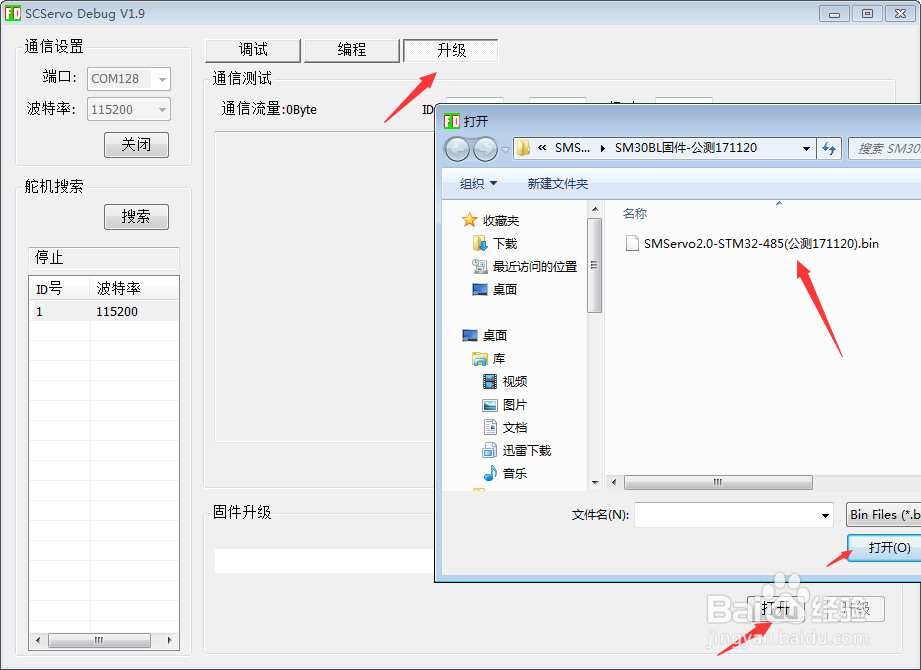
2、12,如果升级固件
3、说明:
1,以上编程中的参数是FD软件读取飞特舵机内部的参数。如果您使用的飞特舵机是SCS系列或SMCL系列,因功能的不同,FD软件读取时就不存在加速度、位置校正等选框。
2,舵机在初次使用时,请按说明和图示进行连接,切勿操之过急,误操作将电源正负接反造成舵机短路或损坏电脑硬件设备。
3,如您熟悉以上教程,舵机在您的细心操作中实现转动,恭喜您轻而易举的学会控制飞特舵机。接下来如果要进入专业模式,通过其他方式如:Arduino/STM32/PC/JAVA/C++/C#控制。我们已为您准备通讯协议、内存表、串口调试助手等内容,供您参考。
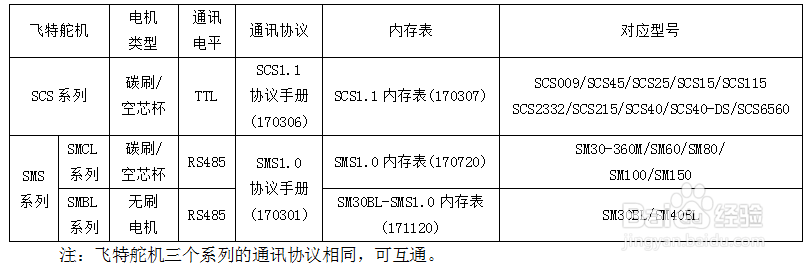
4,飞特舵机分三个系列: